 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelective Inverse Kinematics: A Novel Approach to Finding Multiple Solutions Fast for High-DoF Robotic
Paper and Code
Feb 16, 2022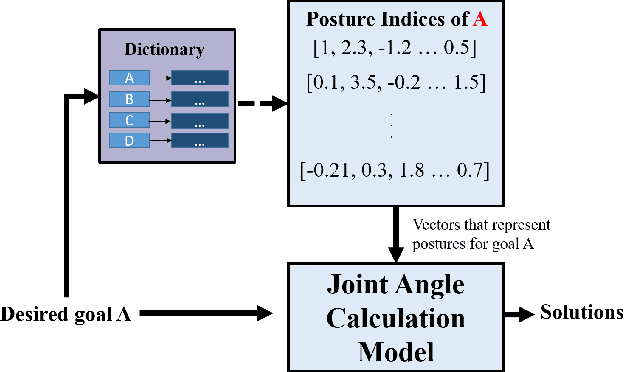
Inverse Kinematics (IK) solves the problem of mapping from the Cartesian space to the joint configuration space of a robotic arm. It has a wide range of applications in areas such as computer graphics, protein structure prediction, and robotics. The problem is commonly solved analytically based on the structure of the robotic arm or numerically by approximation through recursive methods, e.g., Jacobian-based methods. Over the past decade, data-driven methods have also been exploited. Unfortunately, these approaches to IK become inadequate for high Degree-of-Freedom (DoF) robotic arms. Theoretically, the redundant DoFs of such robotic arms can provide an infinite number of solutions to IK for reaching a given target position. The huge solution space could be exploited for more flexible operations of high-DoF robotic arms. The problem is that existing approaches are confined and normally produce only one joint solution for a target position. This paper presents the first work that solves high-DoF IK by generating multiple distinct joint solutions to reach any given target position in the working space. The proposed data-driven approach can be applied to any robotic arms without knowing detailed kinematics information. It not only obtains multiple distinct joint solutions for a target position, but also solves the high-DoF IK problem within a millisecond and achieves subcentimeter distance errors with very sparse training data.