 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Human Motion Prediction via Stochastic Differential Equations
Paper and Code
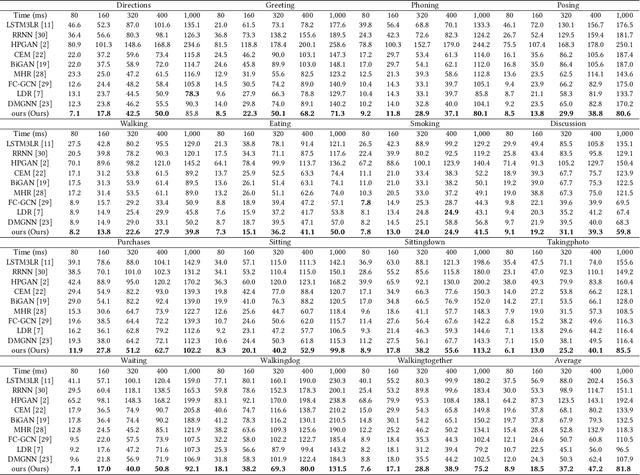
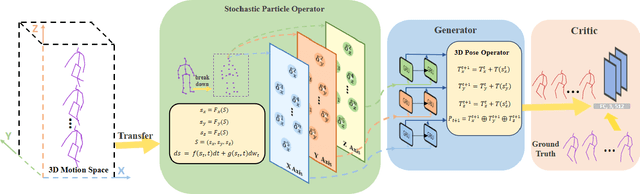
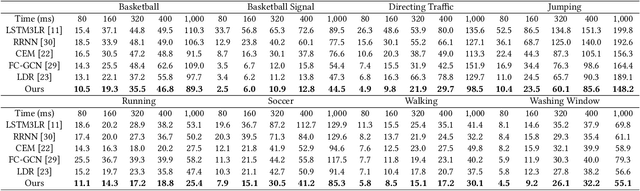
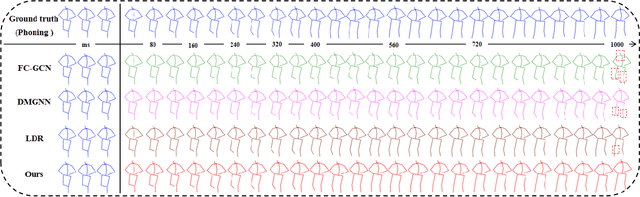
Human motion understanding and prediction is an integral aspect in our pursuit of machine intelligence and human-machine interaction systems. Current methods typically pursue a kinematics modeling approach, relying heavily upon prior anatomical knowledge and constraints. However, such an approach is hard to generalize to different skeletal model representations, and also tends to be inadequate in accounting for the dynamic range and complexity of motion, thus hindering predictive accuracy. In this work, we propose a novel approach in modeling the motion prediction problem based on stochastic differential equations and path integrals. The motion profile of each skeletal joint is formulated as a basic stochastic variable and modeled with the Langevin equation. We develop a strategy of employing GANs to simulate path integrals that amounts to optimizing over possible future paths. We conduct experiments in two large benchmark datasets, Human 3.6M and CMU MoCap. It is highlighted that our approach achieves a 12.48% accuracy improvement over current state-of-the-art methods in average.