 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTracking Grow-Finish Pigs Across Large Pens Using Multiple Cameras
Paper and Code
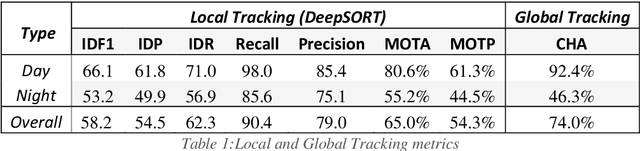
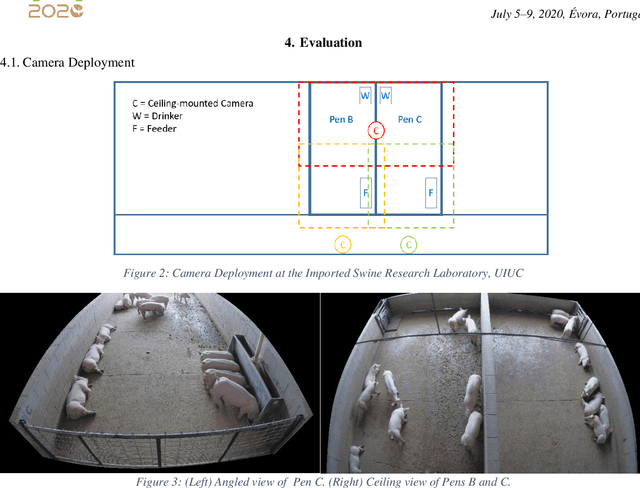
Increasing demand for meat products combined with farm labor shortages has resulted in a need to develop new real-time solutions to monitor animals effectively. Significant progress has been made in continuously locating individual pigs using tracking-by-detection methods. However, these methods fail for oblong pens because a single fixed camera does not cover the entire floor at adequate resolution. We address this problem by using multiple cameras, placed such that the visual fields of adjacent cameras overlap, and together they span the entire floor. Avoiding breaks in tracking requires inter-camera handover when a pig crosses from one camera's view into that of an adjacent camera. We identify the adjacent camera and the shared pig location on the floor at the handover time using inter-view homography. Our experiments involve two grow-finish pens, housing 16-17 pigs each, and three RGB cameras. Our algorithm first detects pigs using a deep learning-based object detection model (YOLO) and creates their local tracking IDs using a multi-object tracking algorithm (DeepSORT). We then use inter-camera shared locations to match multiple views and generate a global ID for each pig that holds throughout tracking. To evaluate our approach, we provide five two-minutes long video sequences with fully annotated global identities. We track pigs in a single camera view with a Multi-Object Tracking Accuracy and Precision of 65.0% and 54.3% respectively and achieve a Camera Handover Accuracy of 74.0%. We open-source our code and annotated dataset at https://github.com/AIFARMS/multi-camera-pig-tracking