 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Deep Learning Approach To Dead-Reckoning Navigation For Autonomous Underwater Vehicles With Limited Sensor Payloads
Paper and Code
Oct 01, 2021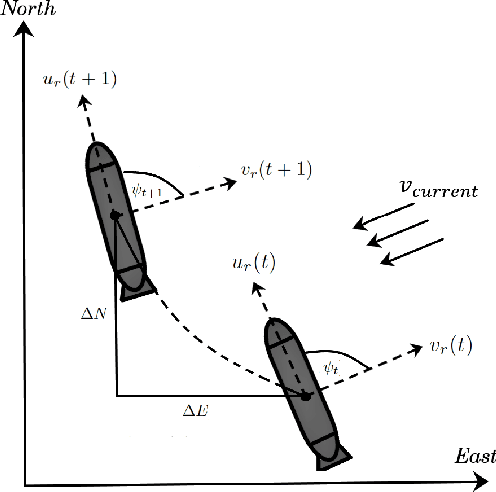
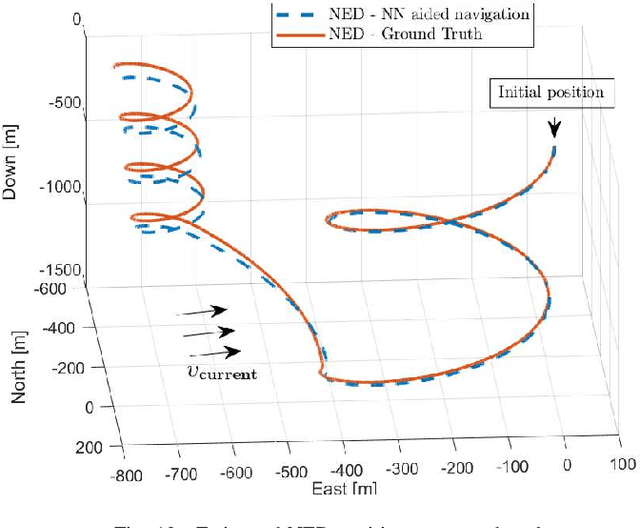
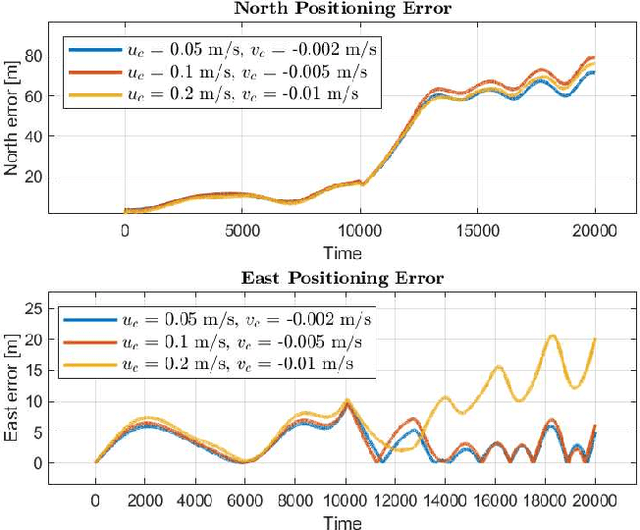
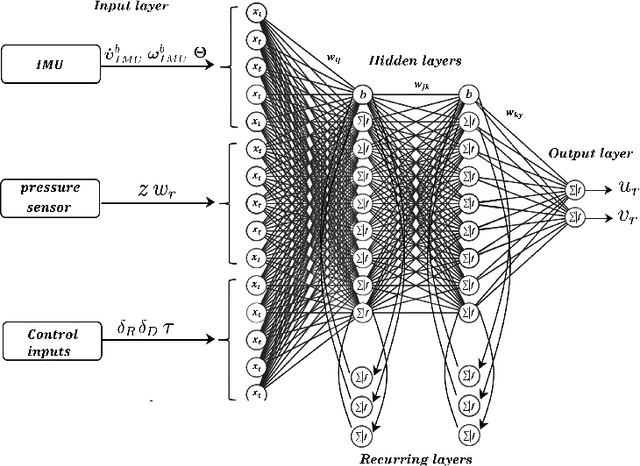
This paper presents a deep learning approach to aid dead-reckoning (DR) navigation using a limited sensor suite. A Recurrent Neural Network (RNN) was developed to predict the relative horizontal velocities of an Autonomous Underwater Vehicle (AUV) using data from an IMU, pressure sensor, and control inputs. The RNN network is trained using experimental data, where a doppler velocity logger (DVL) provided ground truth velocities. The predictions of the relative velocities were implemented in a dead-reckoning algorithm to approximate north and east positions. The studies in this paper were twofold I) Experimental data from a Long-Range AUV was investigated. Datasets from a series of surveys in Monterey Bay, California (U.S) were used to train and test the RNN network. II) The second study explore datasets generated by a simulated autonomous underwater glider. Environmental variables e.g ocean currents were implemented in the simulation to reflect real ocean conditions. The proposed neural network approach to DR navigation was compared to the on-board navigation system and ground truth simulated positions.