Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn Inverse Inertia Matrix and Contact-Force Model for Robotic Manipulators at Normal Impacts
Paper and Code
Sep 10, 2021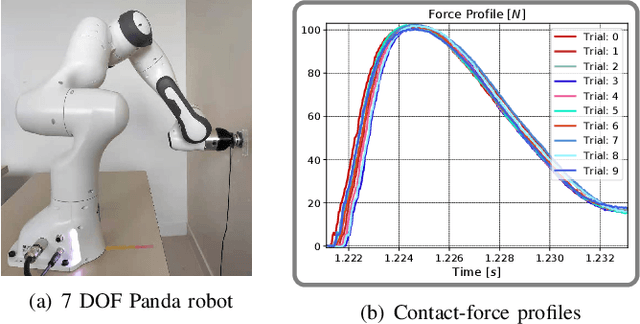

We revisit the impact with zero tangential contact velocities caused by an articulated robot arm contacting its rigid environment. The impact behavior depends on the fixed base and multiple rigid links connected by motorized joints. Our thorough analysis focuses on deriving the suitable inverse inertia matrix and a realistic contact-force model. We conducted real-robot experiments with the 7 DOF Panda manipulator, collecting data of 150 impacts with varying joint configurations and different end-effector speeds. Our findings suggest computing the inverse inertia matrix assuming the joints are locked, i.e., transform the composite-rigid-body inertia at the contact point, and the measurement-consistent contact-force model is viscoelastic.
View paper on