 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNoise will be noise: Or phase optimized recursive filters for interference suppression, signal differentiation and state estimation
Paper and Code
Jun 01, 2021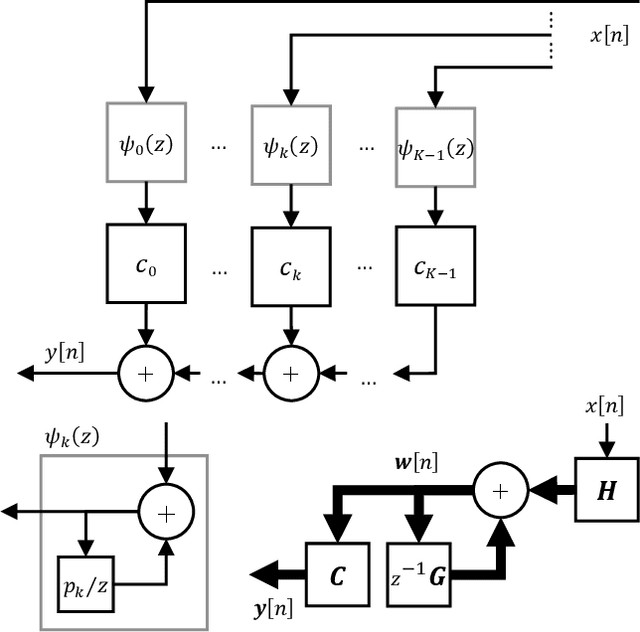
The increased temporal and spectral resolution of oversampled systems allows many sensor-signal analysis tasks to be performed (e.g. detection, classification and tracking) using a filterbank of low-pass digital differentiators. Such filters are readily designed via flatness constraints on the derivatives of the complex frequency response at dc, pi and at the centre frequencies of narrowband interferers, i.e. using maximally-flat (MaxFlat) designs. Infinite-impulse-response (IIR) filters are ideal in embedded online systems with high data-rates because computational complexity is independent of their (fading) memory. A novel procedure for the design of MaxFlat IIR filterbanks with improved passband phase linearity is presented in this paper, as a possible alternative to Kalman and Wiener filters in a class of derivative-state estimation problems with uncertain signal models. Butterworth poles are used for configurable bandwidth and guaranteed stability. Flatness constraints of arbitrary order are derived for temporal derivatives of arbitrary order and a prescribed group delay. As longer lags (in samples) are readily accommodated in oversampled systems, an expression for the optimal group delay that minimizes the white-noise gain (i.e. the error variance of the derivative estimate at steady state) is derived. Filter zeros are optimally placed for the required passband phase response and the cancellation of narrowband interferers in the stopband, by solving a linear system of equations. Low complexity filterbank realizations are discussed then their behaviour is analysed in a Teager-Kaiser operator to detect pulsed signals and in a state observer to track manoeuvring targets in simulated scenarios.