 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeuroscience-inspired perception-action in robotics: applying active inference for state estimation, control and self-perception
Paper and Code
May 10, 2021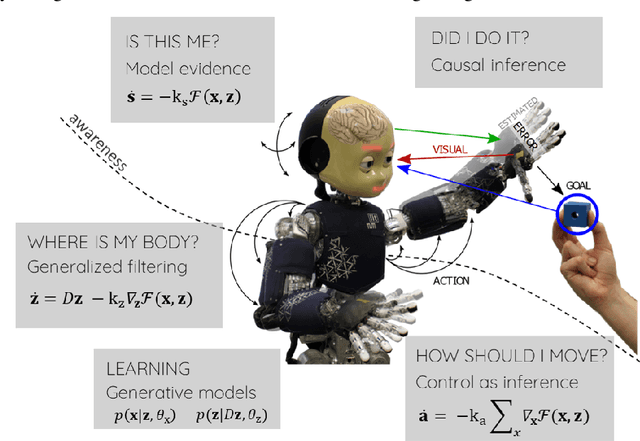
Unlike robots, humans learn, adapt and perceive their bodies by interacting with the world. Discovering how the brain represents the body and generates actions is of major importance for robotics and artificial intelligence. Here we discuss how neuroscience findings open up opportunities to improve current estimation and control algorithms in robotics. In particular, how active inference, a mathematical formulation of how the brain resists a natural tendency to disorder, provides a unified recipe to potentially solve some of the major challenges in robotics, such as adaptation, robustness, flexibility, generalization and safe interaction. This paper summarizes some experiments and lessons learned from developing such a computational model on real embodied platforms, i.e., humanoid and industrial robots. Finally, we showcase the limitations and challenges that we are still facing to give robots human-like perception