 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Computationally Efficient Approach to Non-cooperative Target Detection and Tracking with Almost No A-priori Information
Paper and Code
Apr 20, 2021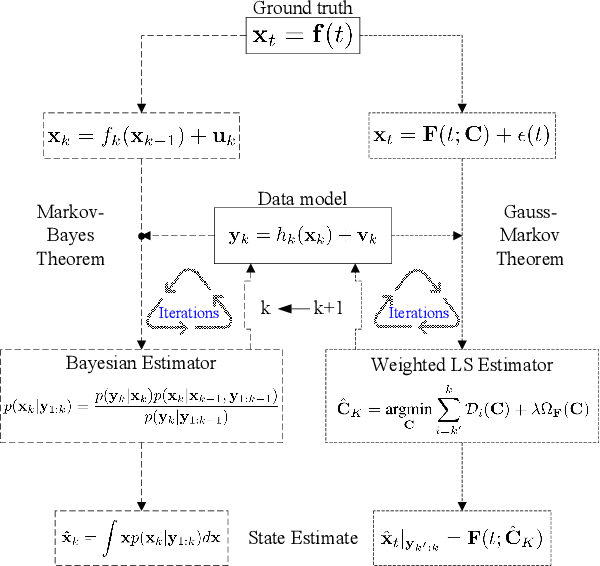
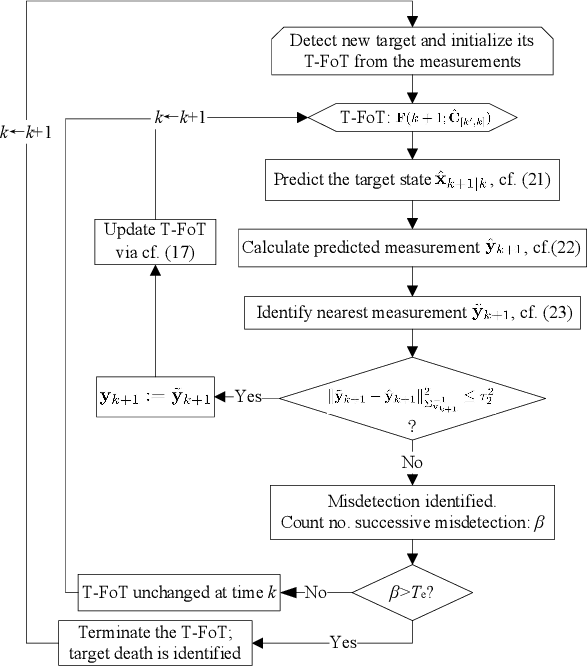
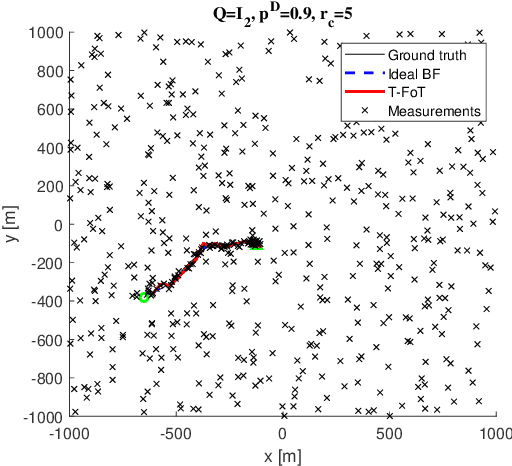
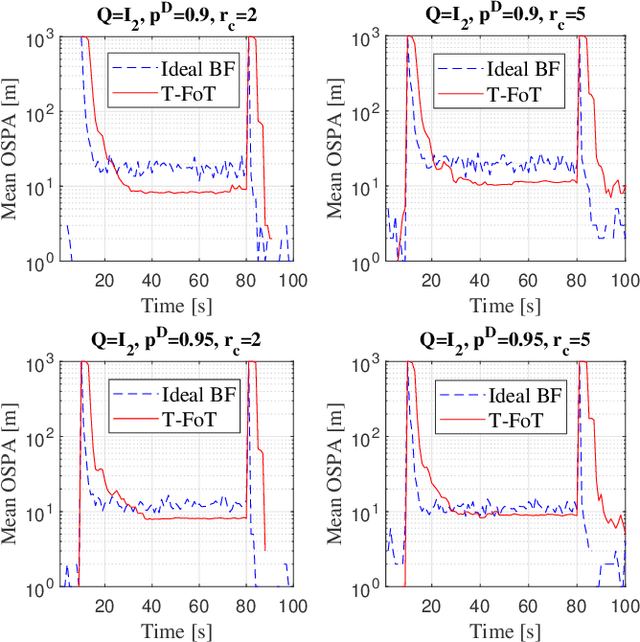
This paper addresses the problem of real-time detection and tracking of a non-cooperative target in the challenging scenario with almost no a-priori information about target birth, death, dynamics and detection probability. Furthermore, there are false and missing data at unknown yet low rates in the measurements. The only information given in advance is about the target-measurement model and the constraint that there is no more than one target in the scenario. To solve these challenges, we model the movement of the target by using a trajectory function of time (T-FoT). Data-driven T-FoT initiation and termination strategies are proposed for identifying the (re-)appearance and disappearance of the target. During the existence of the target, real target measurements are distinguished from clutter if the target indeed exists and is detected, in order to update the T-FoT at each scan for which we design a least-squares estimator. Simulations using either linear or nonlinear systems are conducted to demonstrate the effectiveness of our approach in comparison with the Bayes optimal Bernoulli filters. The results show that our approach is comparable to the perfectly-modeled filters, even outperforms them in some cases while requiring much less a-prior information and computing much faster.