 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSIENet: Spatial Information Enhancement Network for 3D Object Detection from Point Cloud
Paper and Code
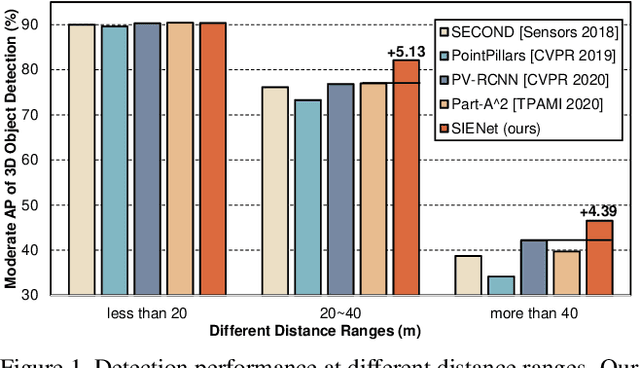
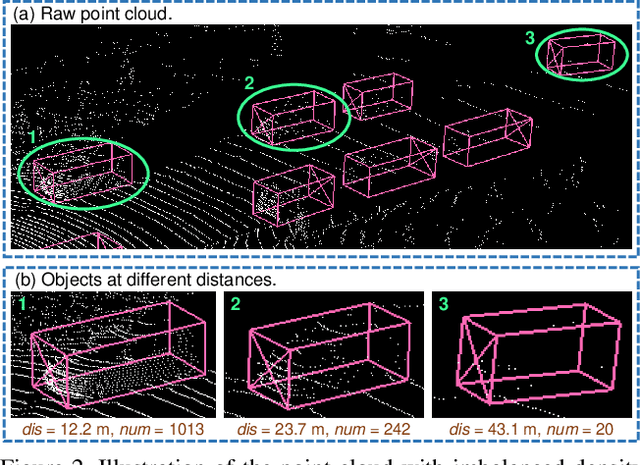
LiDAR-based 3D object detection pushes forward an immense influence on autonomous vehicles. Due to the limitation of the intrinsic properties of LiDAR, fewer points are collected at the objects farther away from the sensor. This imbalanced density of point clouds degrades the detection accuracy but is generally neglected by previous works. To address the challenge, we propose a novel two-stage 3D object detection framework, named SIENet. Specifically, we design the Spatial Information Enhancement (SIE) module to predict the spatial shapes of the foreground points within proposals, and extract the structure information to learn the representative features for further box refinement. The predicted spatial shapes are complete and dense point sets, thus the extracted structure information contains more semantic representation. Besides, we design the Hybrid-Paradigm Region Proposal Network (HP-RPN) which includes multiple branches to learn discriminate features and generate accurate proposals for the SIE module. Extensive experiments on the KITTI 3D object detection benchmark show that our elaborately designed SIENet outperforms the state-of-the-art methods by a large margin.