 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Axis Force Sensing in Robotic Minimally Invasive Surgery With No Instrument Modification
Paper and Code
Mar 20, 2021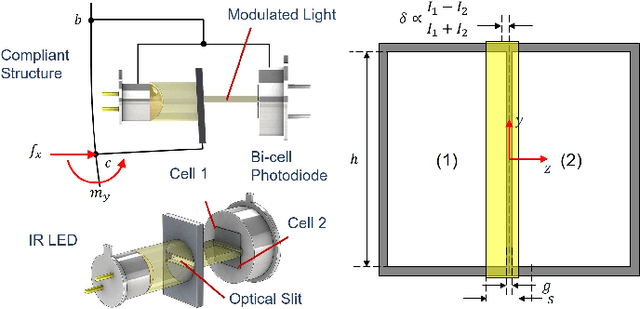
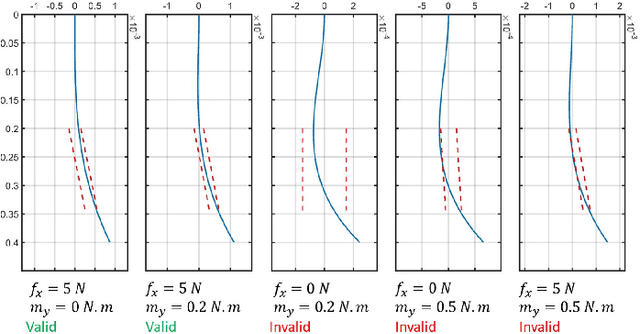
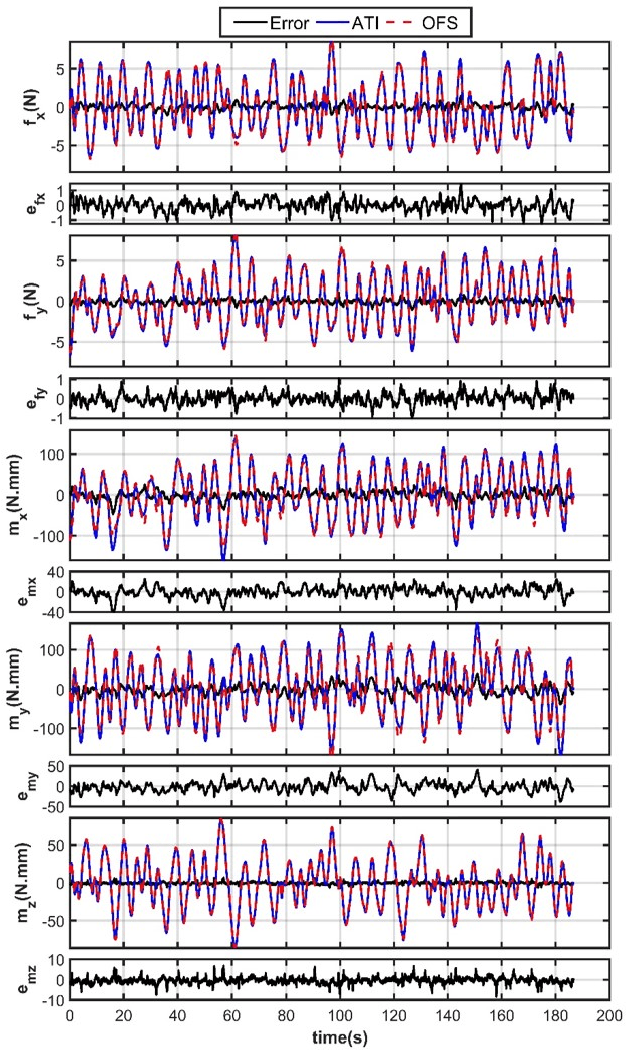
This paper presents a novel multi-axis force-sensing approach in robotic minimally invasive surgery with no modification to the surgical instrument. Thus, it is adaptable to different surgical instruments. A novel 6-axis optical force sensor, with local signal conditioning and digital electronics, was mounted onto the proximal shaft of a da Vinci EndoWrist instrument. A new cannula design comprising an inner tube and an outer tube was proposed. The inner tube is attached to the cannula interface to the robot base through a compliant leaf spring with adjustable stiffness. It allows bending of the instrument shaft due to the tip forces. The outer tube mechanically filters out the body forces from affecting the instrument bending behavior. A mathematical model of the sensing principle was developed and used for model-based calibration. A data-driven calibration based on a shallow neural network architecture comprising a single 5-nodes hidden layer and a 5x1 output layer is discussed. Extensive testing was conducted to validate that the sensor can successfully measure the lateral forces and moments and the axial torque applied to the instruments distal end within the desired resolution, accuracy, and range requirements.