 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeClosed-Loop Error Learning Control for Uncertain Nonlinear Systems With Experimental Validation on a Mobile Robot
Paper and Code
Mar 16, 2021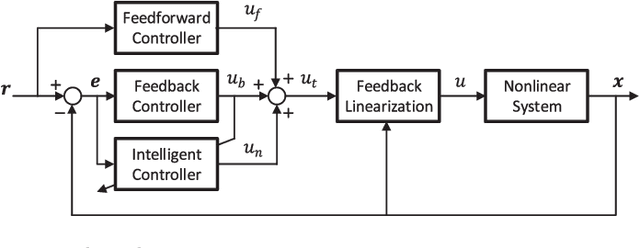
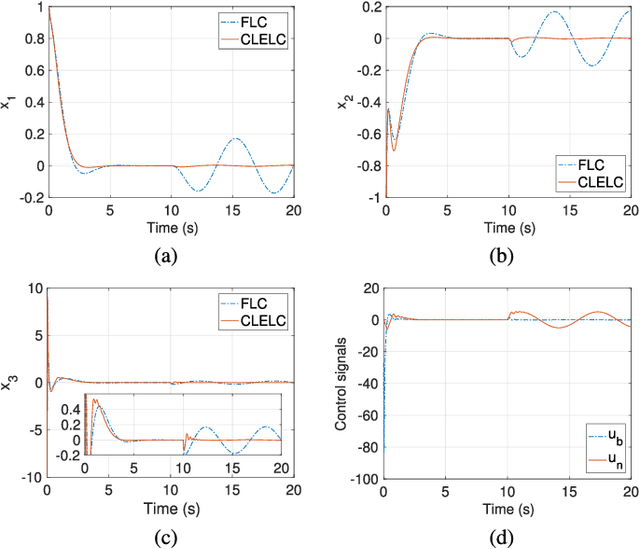
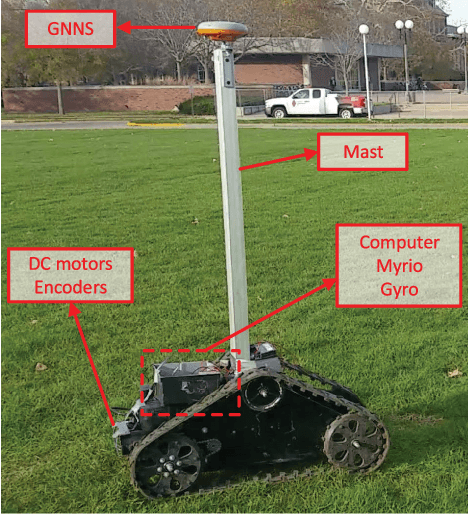
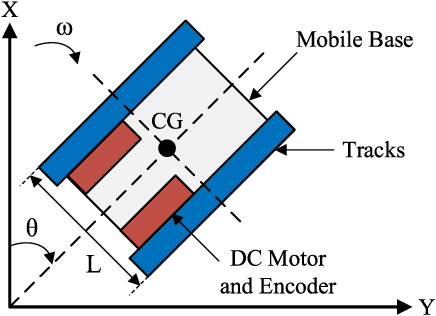
This paper develops a Closed-Loop Error Learning Control (CLELC) algorithm for feedback linearizable systems with experimental validation on a mobile robot. Traditional feedback and feedforward controllers are designed based on the nominal model by using Feedback Linearization Control (FLC) method. Then, an intelligent controller is designed based on sliding mode learning algorithm that utilizes closed-loop error dynamics to learn the system behavior. The controllers are working in parallel, and the intelligent controller can gradually replace the feedback controller from the control of the system. In addition to the stability of the sliding mode learning algorithm, the closed-loop stability of an $n$th order feedback linearizable system is proven. The simulation results demonstrate that CLELC algorithm can improve control performance (e.g., smaller rise time, settling time and overshoot) in the absence of uncertainties, and also provides robust control performance in the presence of uncertainties as compared to traditional FLC method. To test the efficiency and efficacy of CLELC algorithm, the trajectory tracking problem of a tracked mobile robot is studied in real-time. The experimental results demonstrate that CLELC algorithm ensures high-accurate trajectory tracking performance than traditional FLC method.