 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistributed Linear-Quadratic Control with Graph Neural Networks
Paper and Code
Mar 16, 2021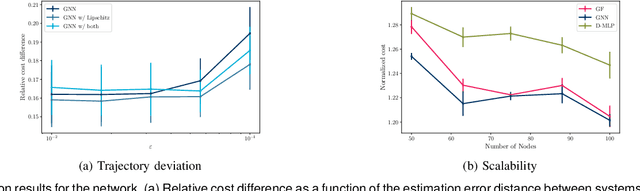
Controlling network systems has become a problem of paramount importance. Optimally controlling a network system with linear dynamics and minimizing a quadratic cost is a particular case of the well-studied linear-quadratic problem. When the specific topology of the network system is ignored, the optimal controller is readily available. However, this results in a centralized controller, facing limitations in terms of implementation and scalability. Finding the optimal distributed controller, on the other hand, is intractable in the general case. In this paper, we propose the use of graph neural networks (GNNs) to parametrize and design a distributed controller. GNNs exhibit many desirable properties, such as being naturally distributed and scalable. We cast the distributed linear-quadratic problem as a self-supervised learning problem, which is then used to train the GNN-based controllers. We also obtain sufficient conditions for the resulting closed-loop system to be input-state stable, and derive an upper bound on the trajectory deviation when the system is not accurately known. We run extensive simulations to study the performance of GNN-based distributed controllers and show that they are computationally efficient and scalable.