Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNth Order Analytical Time Derivatives of Inverse Dynamics in Recursive and Closed Forms
Paper and Code
Mar 10, 2021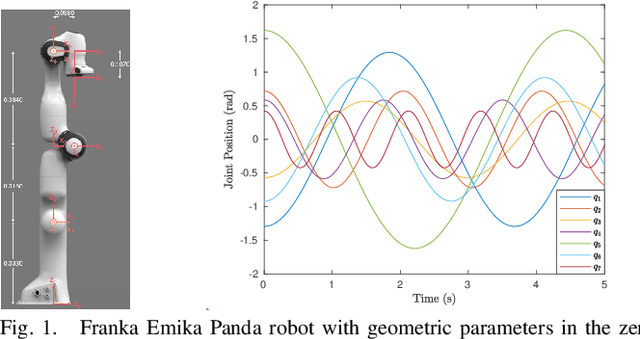
Derivatives of equations of motion describing the rigid body dynamics are becoming increasingly relevant for the robotics community and find many applications in design and control of robotic systems. Controlling robots, and multibody systems comprising elastic components in particular, not only requires smooth trajectories but also the time derivatives of the control forces/torques, hence of the equations of motion (EOM). This paper presents novel nth order time derivatives of the EOM in both closed and recursive forms. While the former provides a direct insight into the structure of these derivatives,the latter leads to their highly efficient implementation for large degree of freedom robotic system.
* 7 pages, 5 figures, Accepted at IEEE ICRA 2021
View paper on