 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCoMo: A novel co-moving 3D camera system
Paper and Code
Jan 26, 2021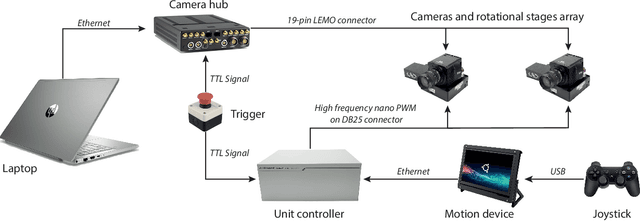
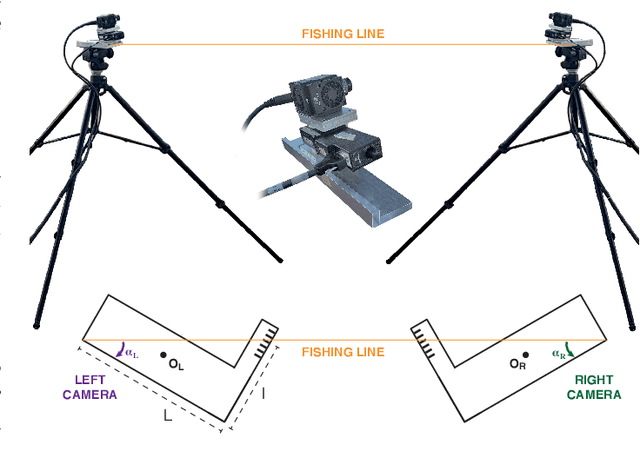
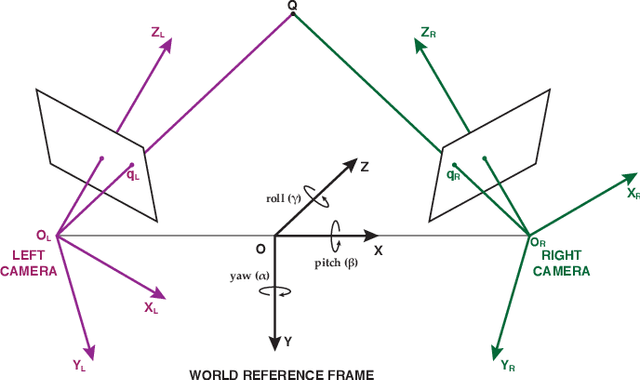
Motivated by the theoretical interest in reconstructing long 3D trajectories of individual birds in large flocks, we developed CoMo, a co-moving camera system of two synchronized high speed cameras coupled with rotational stages, which allow us to dynamically follow the motion of a target flock. With the rotation of the cameras we overcome the limitations of standard static systems that restrict the duration of the collected data to the short interval of time in which targets are in the cameras common field of view, but at the same time we change in time the external parameters of the system, which have then to be calibrated frame-by-frame. We address the calibration of the external parameters measuring the position of the cameras and their three angles of yaw, pitch and roll in the system "home" configuration (rotational stage at an angle equal to 0deg and combining this static information with the time dependent rotation due to the stages. We evaluate the robustness and accuracy of the system by comparing reconstructed and measured 3D distances in what we call 3D tests, which show a relative error of the order of 1%. The novelty of the work presented in this paper is not only on the system itself, but also on the approach we use in the tests, which we show to be a very powerful tool in detecting and fixing calibration inaccuracies and that, for this reason, may be relevant for a broad audience.