 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-grained Trajectory Graph Convolutional Networks for Habit-unrelated Human Motion Prediction
Paper and Code
Dec 23, 2020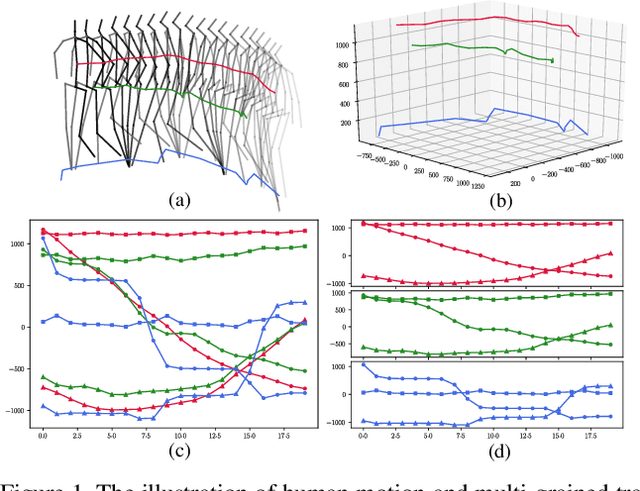
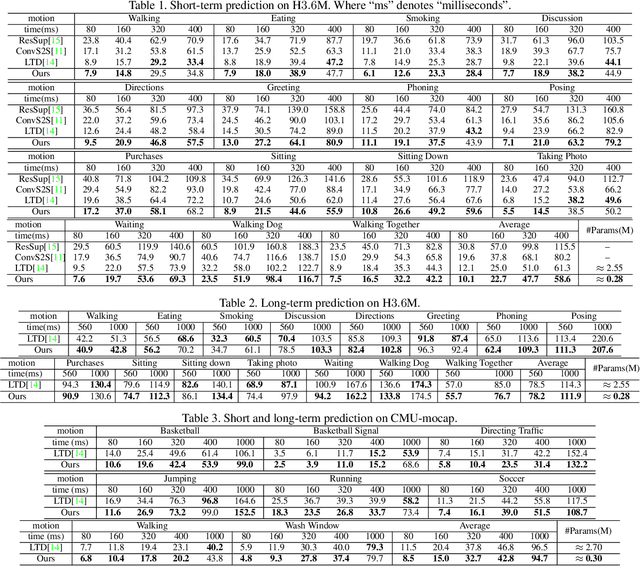
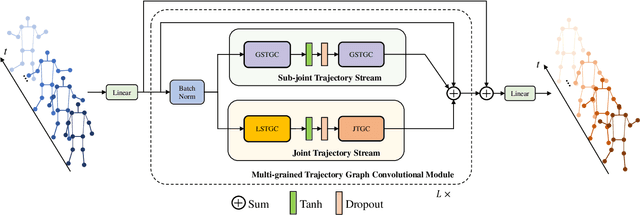
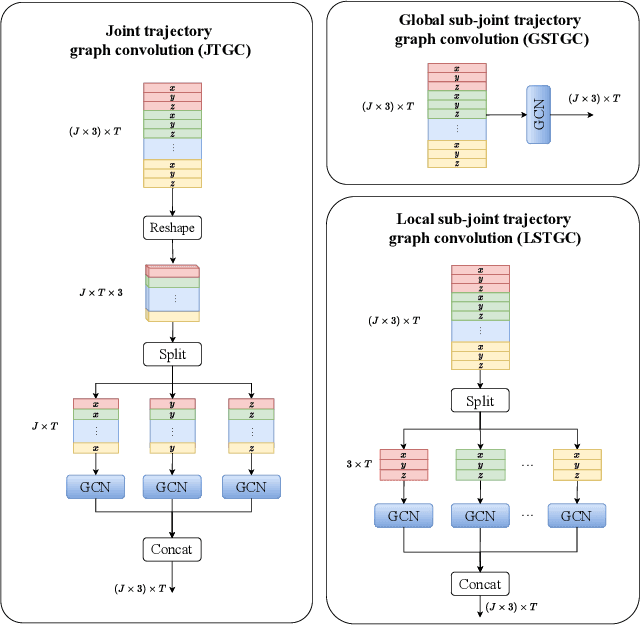
Human motion prediction is an essential part for human-robot collaboration. Unlike most of the existing methods mainly focusing on improving the effectiveness of spatiotemporal modeling for accurate prediction, we take effectiveness and efficiency into consideration, aiming at the prediction quality, computational efficiency and the lightweight of the model. A multi-grained trajectory graph convolutional networks based and lightweight framework is proposed for habit-unrelated human motion prediction. Specifically, we represent human motion as multi-grained trajectories, including joint trajectory and sub-joint trajectory. Based on the advanced representation, multi-grained trajectory graph convolutional networks are proposed to explore the spatiotemporal dependencies at the multiple granularities. Moreover, considering the right-handedness habit of the vast majority of people, a new motion generation method is proposed to generate the motion with left-handedness, to better model the motion with less bias to the human habit. Experimental results on challenging datasets, including Human3.6M and CMU Mocap, show that the proposed model outperforms state-of-the-art with less than 0.12 times parameters, which demonstrates the effectiveness and efficiency of our proposed method.