Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlanning from Pixels using Inverse Dynamics Models
Paper and Code
Dec 04, 2020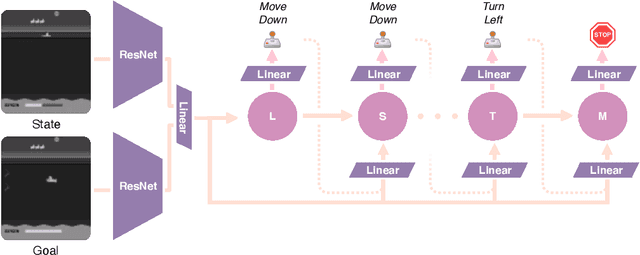
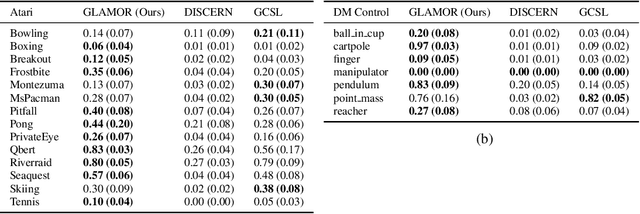
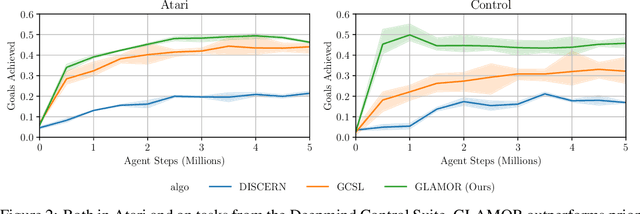
Learning task-agnostic dynamics models in high-dimensional observation spaces can be challenging for model-based RL agents. We propose a novel way to learn latent world models by learning to predict sequences of future actions conditioned on task completion. These task-conditioned models adaptively focus modeling capacity on task-relevant dynamics, while simultaneously serving as an effective heuristic for planning with sparse rewards. We evaluate our method on challenging visual goal completion tasks and show a substantial increase in performance compared to prior model-free approaches.
* 9 pages, 4 figures
View paper on
 OpenReview
OpenReview