 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproved rates for identification of partially observed linear dynamical systems
Paper and Code
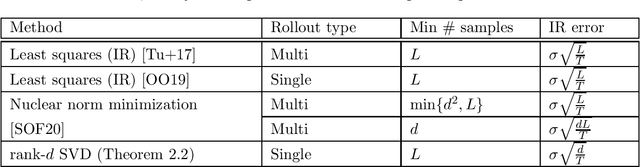
Identification of a linear time-invariant dynamical system from partial observations is a fundamental problem in control theory. A natural question is how to do so with non-asymptotic statistical rates depending on the inherent dimensionality (order) $d$ of the system, rather than on the sufficient rollout length or on $\frac1{1-\rho(A)}$, where $\rho(A)$ is the spectral radius of the dynamics matrix. We develop the first algorithm that given a single trajectory of length $T$ with gaussian observation noise, achieves a near-optimal rate of $\widetilde O\left(\sqrt\frac{d}{T}\right)$ in $\mathcal{H}_2$ error for the learned system. We also give bounds under process noise and improved bounds for learning a realization of the system. Our algorithm is based on low-rank approximation of Hankel matrices of geometrically increasing sizes.