 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGenerative Adversarial Network to Learn Valid Distributions of Robot Configurations for Inverse Kinematics and Constrained Motion Planning
Paper and Code
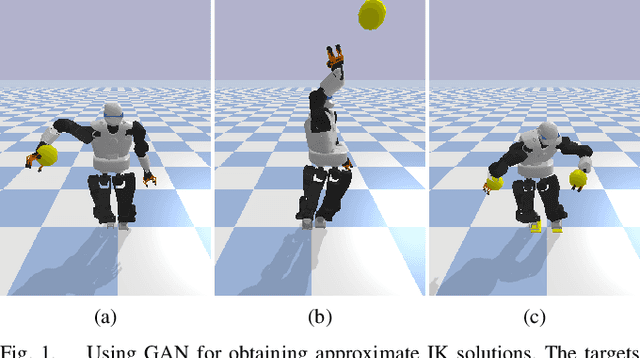
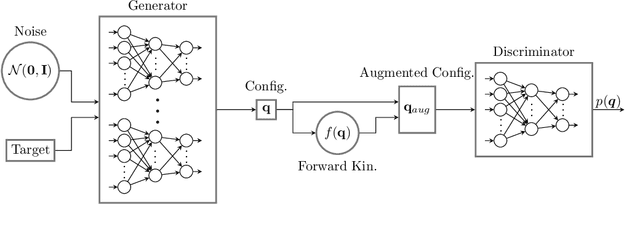
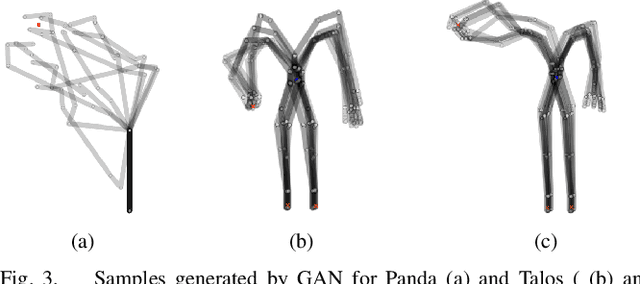
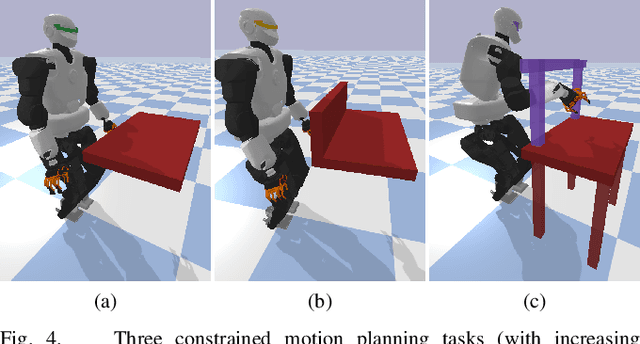
In high dimensional robotic system, the manifold of the valid configuration space often has complex shape, especially under constraints such as end-effector orientation, static stability, and obstacles. We propose a generative adversarial network approach to learn the distribution of valid robot configurations. It can generate configurations that are close to the constraint manifold. We present two applications of this method. First, by learning the conditional distribution with respect to the desired end-effector position, we can do fast inverse kinematics even for very high degrees-of-freedom (DoF) systems. Then, it can be used to generate samples in sampling based constrained motion planning algorithms to reduce the necessary projection steps, speeding up computation. We validate the approach in simulation using the 7-DoF Panda manipulator and the 28-DoF humanoid robot Talos.