 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContinual Unsupervised Domain Adaptation with Adversarial Learning
Paper and Code
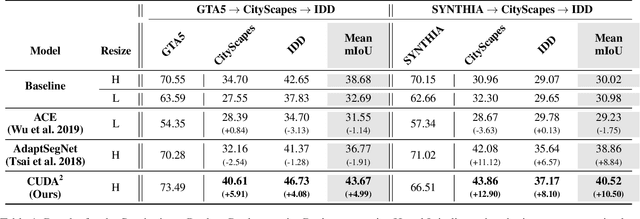
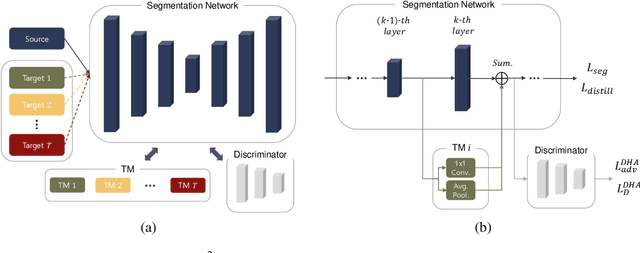
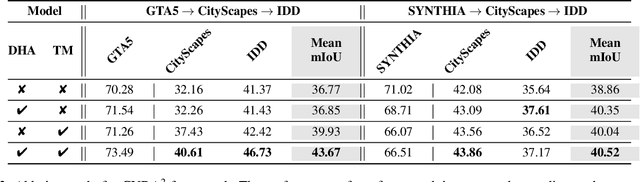
Unsupervised Domain Adaptation (UDA) is essential for autonomous driving due to a lack of labeled real-world road images. Most of the existing UDA methods, however, have focused on a single-step domain adaptation (Synthetic-to-Real). These methods overlook a change in environments in the real world as time goes by. Thus, developing a domain adaptation method for sequentially changing target domains without catastrophic forgetting is required for real-world applications. To deal with the problem above, we propose Continual Unsupervised Domain Adaptation with Adversarial learning (CUDA^2) framework, which can generally be applicable to other UDA methods conducting adversarial learning. CUDA^2 framework generates a sub-memory, called Target-specific Memory (TM) for each new target domain guided by Double Hinge Adversarial (DHA) loss. TM prevents catastrophic forgetting by storing target-specific information, and DHA loss induces a synergy between the existing network and the expanded TM. To the best of our knowledge, we consider realistic autonomous driving scenarios (Synthetic-to-Real-to-Real) in UDA research for the first time. The model with our framework outperforms other state-of-the-art models under the same settings. Besides, extensive experiments are conducted as ablation studies for in-depth analysis.