Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3D Object Localization Using 2D Estimates for Computer Vision Applications
Paper and Code
Sep 24, 2020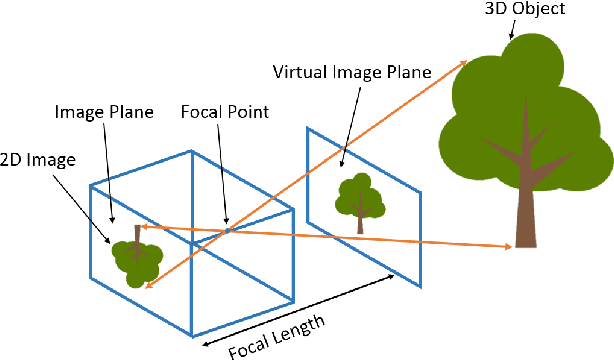
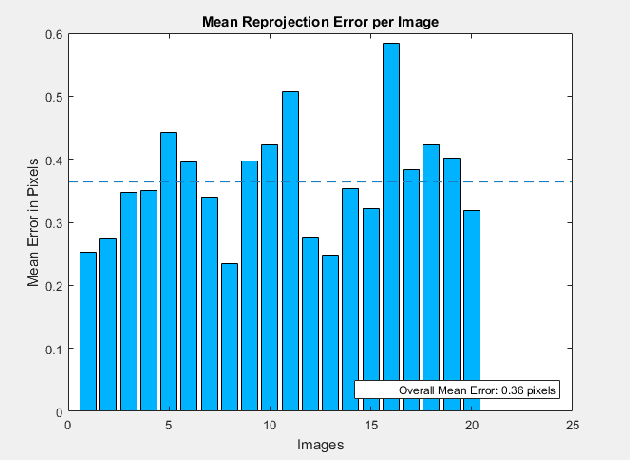
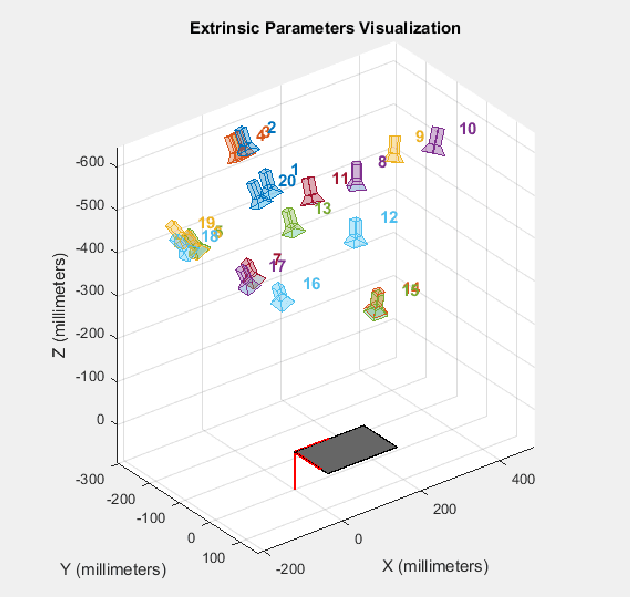
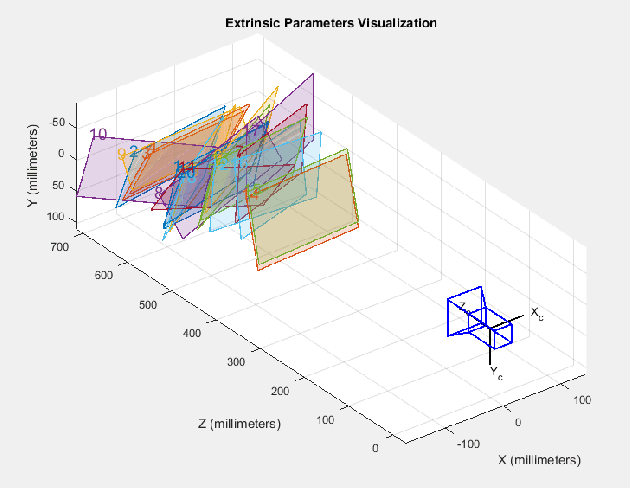
A technique for object localization based on pose estimation and camera calibration is presented. The 3-dimensional (3D) coordinates are estimated by collecting multiple 2-dimensional (2D) images of the object and are utilized for the calibration of the camera. The calibration steps involving a number of parameter calculation including intrinsic and extrinsic parameters for the removal of lens distortion, computation of object's size and camera's position calculation are discussed. A transformation strategy to estimate the 3D pose using the 2D images is presented. The proposed method is implemented on MATLAB and validation experiments are carried out for both pose estimation and camera calibration.
View paper on