 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVision-Based Autonomous Drone Control using Supervised Learning in Simulation
Paper and Code
Sep 09, 2020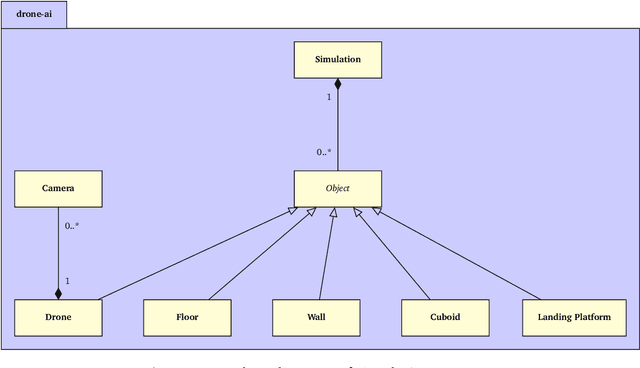

Limited power and computational resources, absence of high-end sensor equipment and GPS-denied environments are challenges faced by autonomous micro areal vehicles (MAVs). We address these challenges in the context of autonomous navigation and landing of MAVs in indoor environments and propose a vision-based control approach using Supervised Learning. To achieve this, we collected data samples in a simulation environment which were labelled according to the optimal control command determined by a path planning algorithm. Based on these data samples, we trained a Convolutional Neural Network (CNN) that maps low resolution image and sensor input to high-level control commands. We have observed promising results in both obstructed and non-obstructed simulation environments, showing that our model is capable of successfully navigating a MAV towards a landing platform. Our approach requires shorter training times than similar Reinforcement Learning approaches and can potentially overcome the limitations of manual data collection faced by comparable Supervised Learning approaches.