 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModel-Reference Reinforcement Learning for Collision-Free Tracking Control of Autonomous Surface Vehicles
Paper and Code
Aug 17, 2020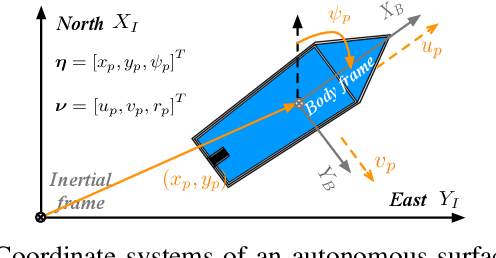
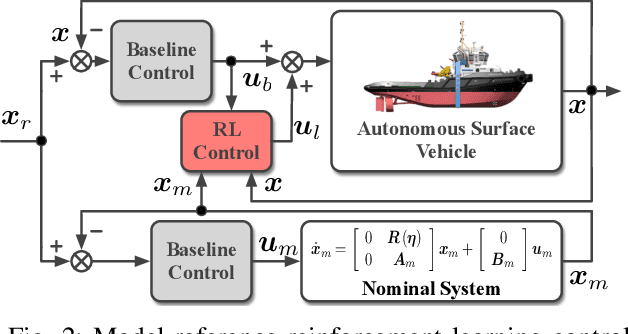
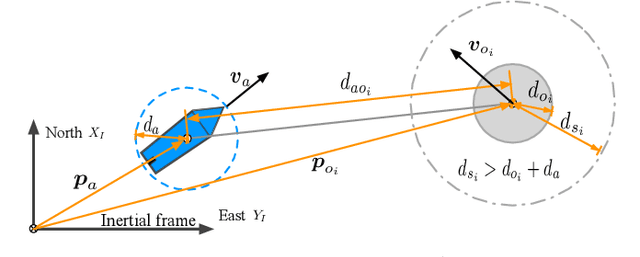
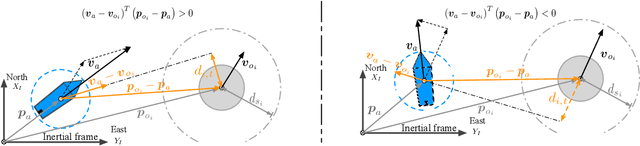
This paper presents a novel model-reference reinforcement learning algorithm for the intelligent tracking control of uncertain autonomous surface vehicles with collision avoidance. The proposed control algorithm combines a conventional control method with reinforcement learning to enhance control accuracy and intelligence. In the proposed control design, a nominal system is considered for the design of a baseline tracking controller using a conventional control approach. The nominal system also defines the desired behaviour of uncertain autonomous surface vehicles in an obstacle-free environment. Thanks to reinforcement learning, the overall tracking controller is capable of compensating for model uncertainties and achieving collision avoidance at the same time in environments with obstacles. In comparison to traditional deep reinforcement learning methods, our proposed learning-based control can provide stability guarantees and better sample efficiency. We demonstrate the performance of the new algorithm using an example of autonomous surface vehicles.