 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHardware Acceleration of Monte-Carlo Sampling for Energy Efficient Robust Robot Manipulation
Paper and Code
Jul 15, 2020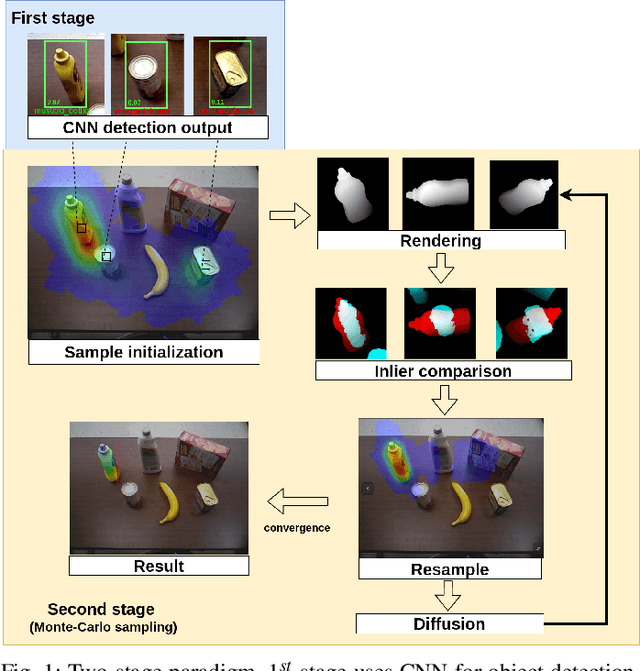
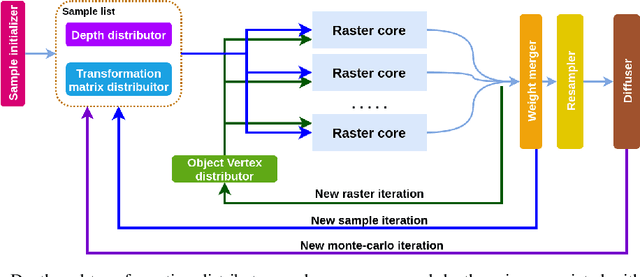
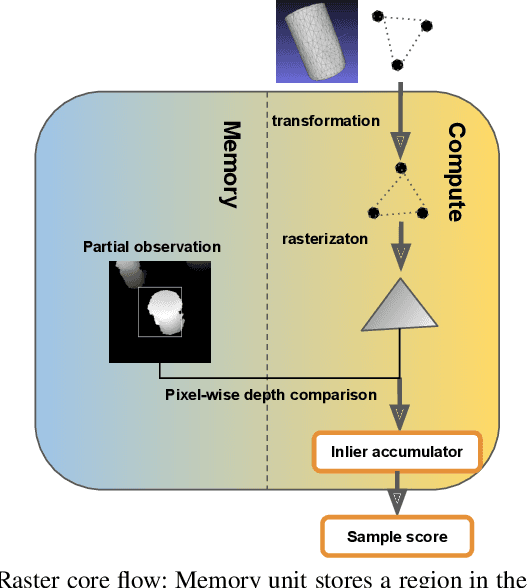
Algorithms based on Monte-Carlo sampling have been widely adapted in robotics and other areas of engineering due to their performance robustness. However, these sampling-based approaches have high computational requirements, making them unsuitable for real-time applications with tight energy constraints. In this paper, we investigate 6 degree-of-freedom (6DoF) pose estimation for robot manipulation using this method, which uses rendering combined with sequential Monte-Carlo sampling. While potentially very accurate, the significant computational complexity of the algorithm makes it less attractive for mobile robots, where runtime and energy consumption are tightly constrained. To address these challenges, we develop a novel hardware implementation of Monte-Carlo sampling on an FPGA with lower computational complexity and memory usage, while achieving high parallelism and modularization. Our results show 12X-21X improvements in energy efficiency over low-power and high-end GPU implementations, respectively. Moreover, we achieve real time performance without compromising accuracy.