 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust navigation with tinyML for autonomous mini-vehicles
Paper and Code
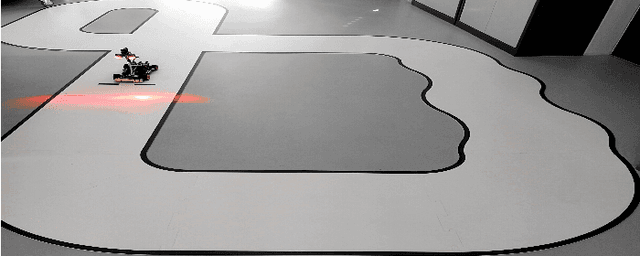

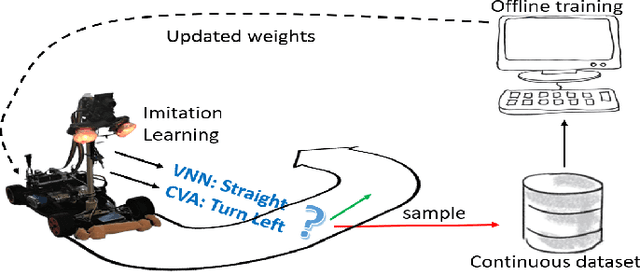
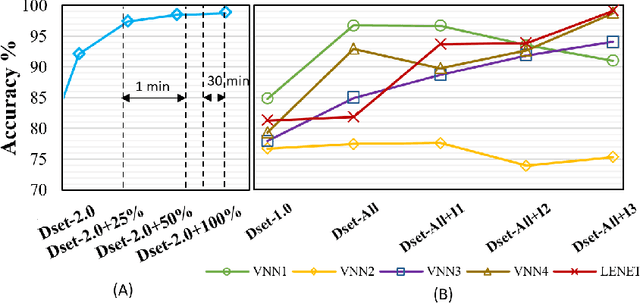
Autonomous navigation vehicles have rapidly improved thanks to the breakthroughs of Deep Learning. However, scaling autonomous driving to low-power and real-time systems deployed on dynamic environments poses several challenges that prevent their adoption. In this work, we show an end-to-end integration of data, algorithms, and deployment tools that enables the deployment of a family of tiny-CNNs on extra-low-power MCUs for autonomous driving mini-vehicles (image classification task). Our end-to-end environment enables a closed-loop learning system that allows the CNNs (learners) to learn through demonstration by imitating the original computer-vision algorithm (teacher) while doubling the throughput. Thereby, our CNNs gain robustness to lighting conditions and increase their accuracy up to 20% when deployed in the most challenging setup with a very fast-rate camera. Further, we leverage GAP8, a parallel ultra-low-power RISC-V SoC, to meet the real-time requirements. When running a family of CNN for an image classification task, GAP8 reduces their latency by over 20x compared to using an STM32L4 (Cortex-M4) or obtains +21.4% accuracy than an NXP k64f (Cortex-M4) solution with the same energy budget.