 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Semantic Segmentation in Adverse Weather Conditions by means of Fast Video-Sequence Segmentation
Paper and Code
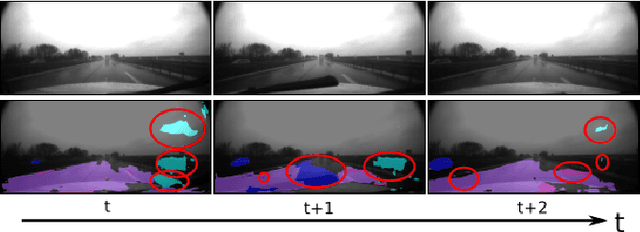
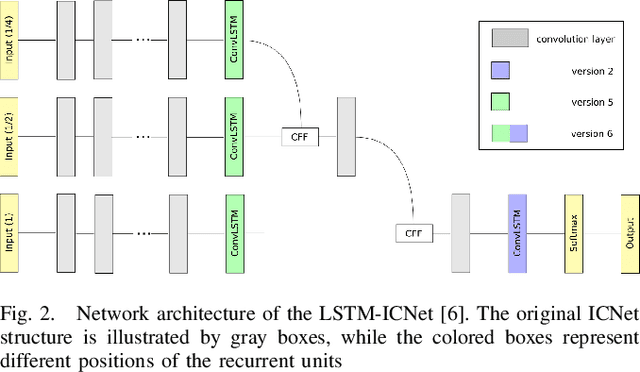
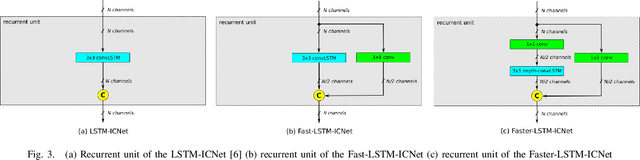
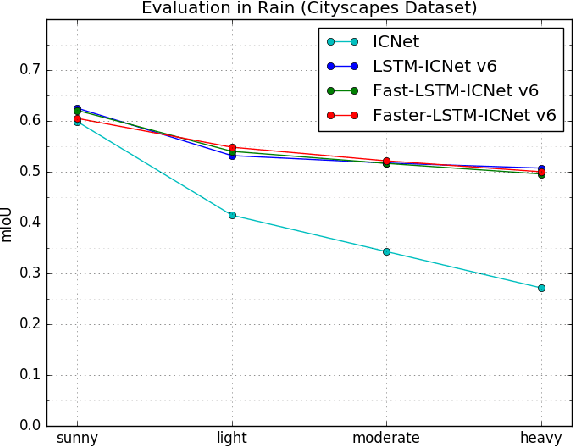
Computer vision tasks such as semantic segmentation perform very well in good weather conditions, but if the weather turns bad, they have problems to achieve this performance in these conditions. One possibility to obtain more robust and reliable results in adverse weather conditions is to use video-segmentation approaches instead of commonly used single-image segmentation methods. Video-segmentation approaches capture temporal information of the previous video-frames in addition to current image information, and hence, they are more robust against disturbances, especially if they occur in only a few frames of the video-sequence. However, video-segmentation approaches, which are often based on recurrent neural networks, cannot be applied in real-time applications anymore, since their recurrent structures in the network are computational expensive. For instance, the inference time of the LSTM-ICNet, in which recurrent units are placed at proper positions in the single-segmentation approach ICNet, increases up to 61 percent compared to the basic ICNet. Hence, in this work, the LSTM-ICNet is sped up by modifying the recurrent units of the network so that it becomes real-time capable again. Experiments on different datasets and various weather conditions show that the inference time can be decreased by about 23 percent by these modifications, while they achieve similar performance than the LSTM-ICNet and outperform the single-segmentation approach enormously in adverse weather conditions.