 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFusing Wearable IMUs with Multi-View Images for Human Pose Estimation: A Geometric Approach
Paper and Code
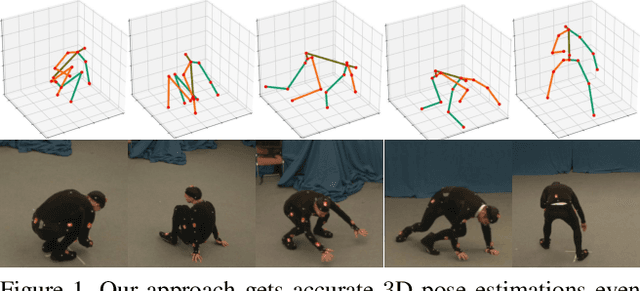
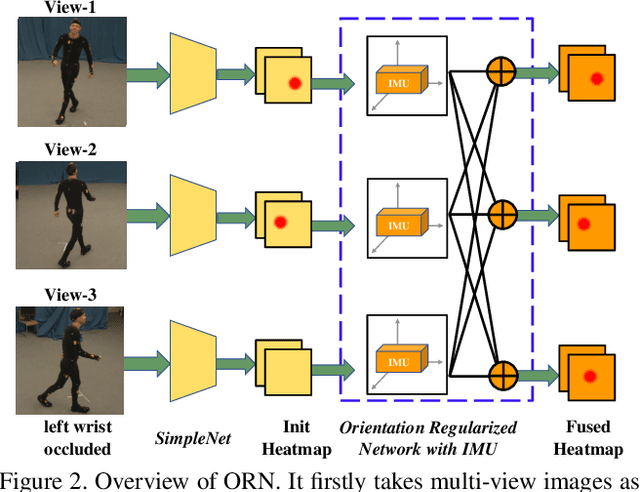

We propose to estimate 3D human pose from multi-view images and a few IMUs attached at person's limbs. It operates by firstly detecting 2D poses from the two signals, and then lifting them to the 3D space. We present a geometric approach to reinforce the visual features of each pair of joints based on the IMUs. This notably improves 2D pose estimation accuracy especially when one joint is occluded. We call this approach Orientation Regularized Network (ORN). Then we lift the multi-view 2D poses to the 3D space by an Orientation Regularized Pictorial Structure Model (ORPSM) which jointly minimizes the projection error between the 3D and 2D poses, along with the discrepancy between the 3D pose and IMU orientations. The simple two-step approach reduces the error of the state-of-the-art by a large margin on a public dataset. Our code will be released at https://github.com/CHUNYUWANG/imu-human-pose-pytorch.