 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePLOP: Probabilistic poLynomial Objects trajectory Planning for autonomous driving
Paper and Code
Mar 09, 2020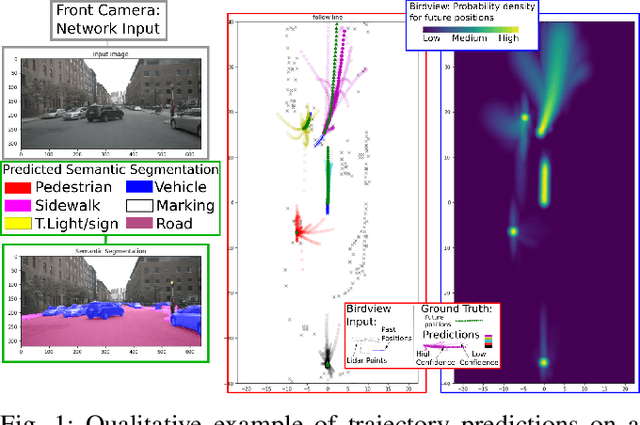
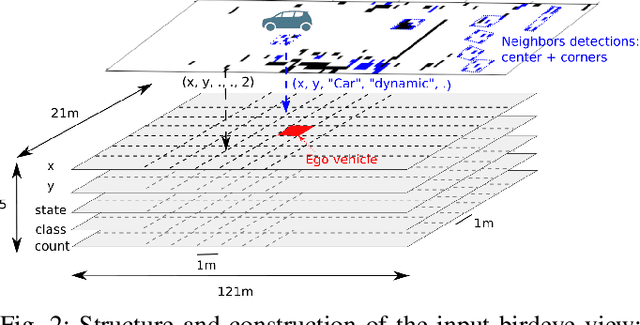
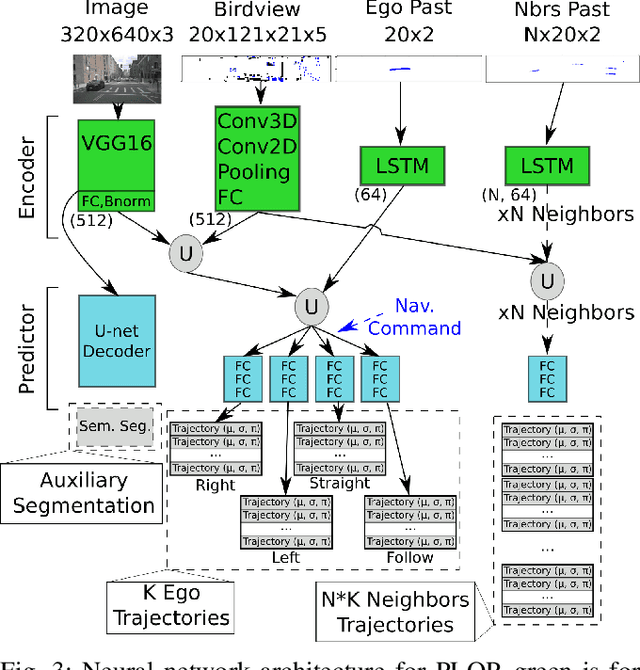
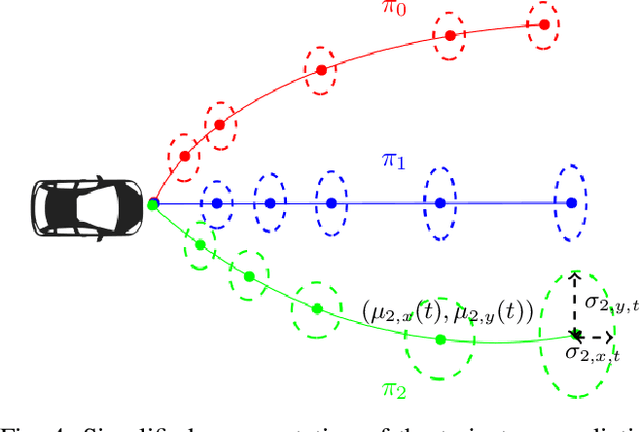
To navigate safely in an urban environment, an autonomous vehicle (ego vehicle) needs to understand and anticipate its surroundings, in particular the behavior of other road users (neighbors). However, multiple choices are often acceptable (e.g. turn right or left, or different ways of avoiding an obstacle). We focus here on predicting multiple feasible future trajectories both for the ego vehicle and neighbors through a probabilistic framework. We use a conditional imitation learning algorithm, conditioned by a navigation command for the ego vehicle (e.g. "turn right"). It takes as input the ego car front camera image, a Lidar point cloud in a bird-eye view grid and present and past objects detections to output ego vehicle and neighbors possible trajectories but also semantic segmentation as an auxiliary loss. We evaluate our method on the publicly available dataset nuScenes, showing state-of-the-art performance and investigating the impact of our architecture choices.