 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDepth Map Estimation of Dynamic Scenes Using Prior Depth Information
Paper and Code
Feb 02, 2020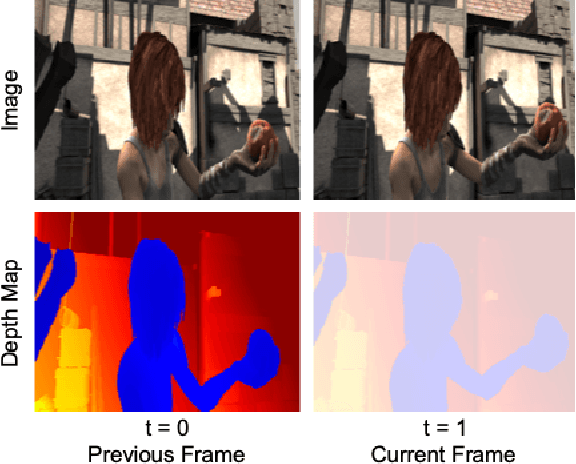

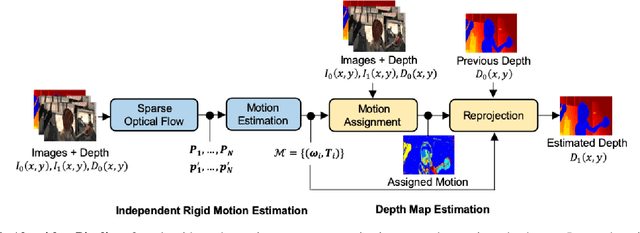
Depth information is useful for many applications. Active depth sensors are appealing because they obtain dense and accurate depth maps. However, due to issues that range from power constraints to multi-sensor interference, these sensors cannot always be continuously used. To overcome this limitation, we propose an algorithm that estimates depth maps using concurrently collected images and a previously measured depth map for dynamic scenes, where both the camera and objects in the scene may be independently moving. To estimate depth in these scenarios, our algorithm models the dynamic scene motion using independent and rigid motions. It then uses the previous depth map to efficiently estimate these rigid motions and obtain a new depth map. Our goal is to balance the acquisition of depth between the active depth sensor and computation, without incurring a large computational cost. Thus, we leverage the prior depth information to avoid computationally expensive operations like dense optical flow estimation or segmentation used in similar approaches. Our approach can obtain dense depth maps at up to real-time (30 FPS) on a standard laptop computer, which is orders of magnitude faster than similar approaches. When evaluated using RGB-D datasets of various dynamic scenes, our approach estimates depth maps with a mean relative error of 2.5% while reducing the active depth sensor usage by over 90%.