 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign, Validation, and Case Studies of 2D-VSR-Sim, an Optimization-friendly Simulator of 2-D Voxel-based Soft Robots
Paper and Code
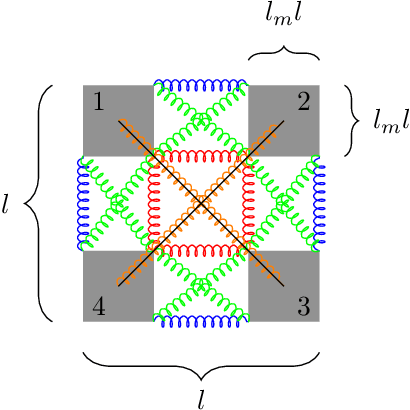
Voxel-based soft robots (VSRs) are aggregations of soft blocks whose design is amenable to optimization. We here present a software, 2D-VSR-Sim, for facilitating research concerning the optimization of VSRs body and brain. The software, written in Java, provides consistent interfaces for all the VSRs aspects suitable for optimization and considers by design the presence of sensing, i.e., the possibility of exploiting the feedback from the environment for controlling the VSR. We experimentally characterize, from a mechanical point of view, the VSRs that can be simulated with 2D-VSR-Sim and we discuss the computational burden of the simulation. Finally, we show how 2D-VSR-Sim can be used to repeat the experiments of significant previous studies and, in perspective, to provide experimental answers to a variety of research questions.