 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to drive via Apprenticeship Learning and Deep Reinforcement Learning
Paper and Code
Jan 12, 2020
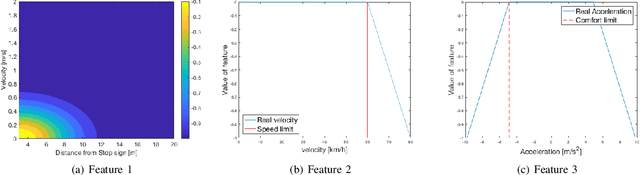
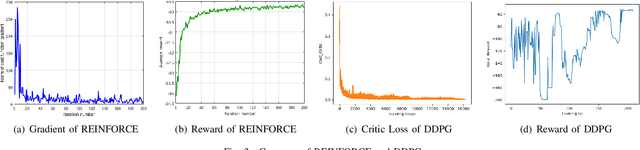
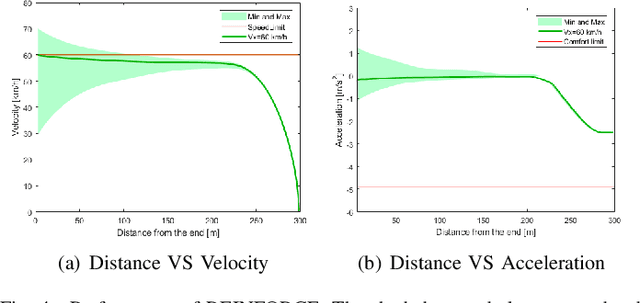
With the implementation of reinforcement learning (RL) algorithms, current state-of-art autonomous vehicle technology have the potential to get closer to full automation. However, most of the applications have been limited to game domains or discrete action space which are far from the real world driving. Moreover, it is very tough to tune the parameters of reward mechanism since the driving styles vary a lot among the different users. For instance, an aggressive driver may prefer driving with high acceleration whereas some conservative drivers prefer a safer driving style. Therefore, we propose an apprenticeship learning in combination with deep reinforcement learning approach that allows the agent to learn the driving and stopping behaviors with continuous actions. We use gradient inverse reinforcement learning (GIRL) algorithm to recover the unknown reward function and employ REINFORCE as well as Deep Deterministic Policy Gradient algorithm (DDPG) to learn the optimal policy. The performance of our method is evaluated in simulation-based scenario and the results demonstrate that the agent performs human like driving and even better in some aspects after training.