 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Reinforcement Learning with Explicitly Represented Knowledge and Variable State and Action Spaces
Paper and Code

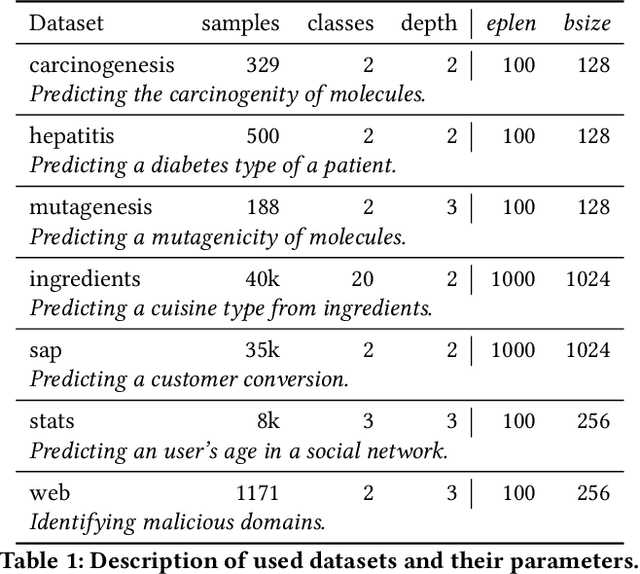
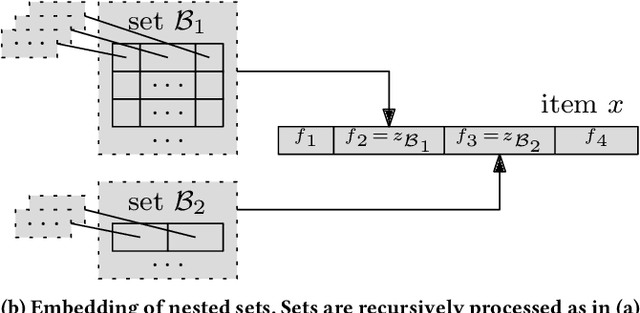
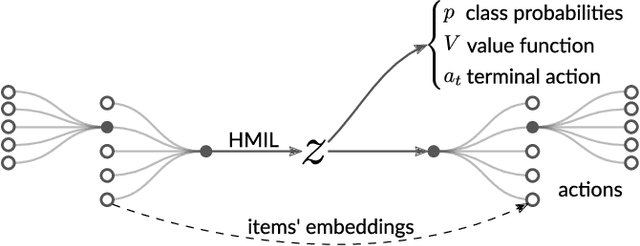
We focus on a class of real-world domains, where gathering hierarchical knowledge is required to accomplish a task. Many problems can be represented in this manner, such as network penetration testing, targeted advertising or medical diagnosis. In our formalization, the task is to sequentially request pieces of information about a sample to build the knowledge hierarchy and terminate when suitable. Any of the learned pieces of information can be further analyzed, resulting in a complex and variable action space. We present a combination of techniques in which the knowledge hierarchy is explicitly represented and given to a deep reinforcement learning algorithm as its input. To process the hierarchical input, we employ Hierarchical Multiple-Instance Learning and to cope with the complex action space, we factor it with hierarchical softmax. Our end-to-end differentiable model is trained with A2C, a standard deep reinforcement learning algorithm. We demonstrate the method in a set of seven classification domains, where the task is to achieve the best accuracy with a set budget on the amount of information retrieved. Compared to baseline algorithms, our method achieves not only better results, but also better generalization.