 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUsing Neural Networks for Programming by Demonstration
Paper and Code
Oct 10, 2019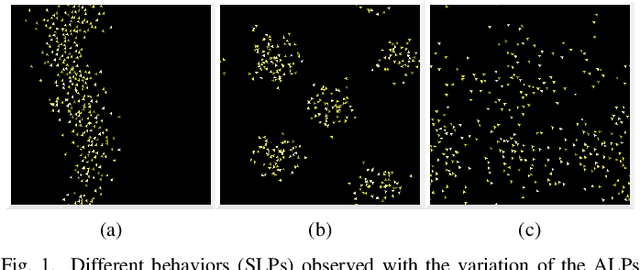
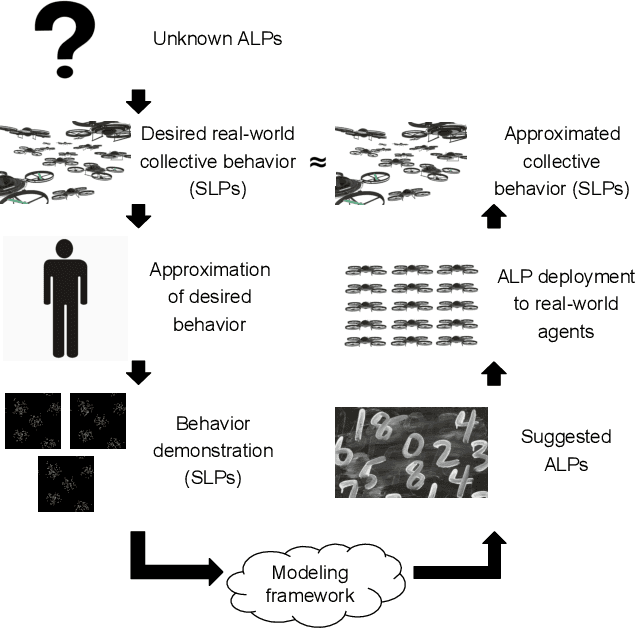
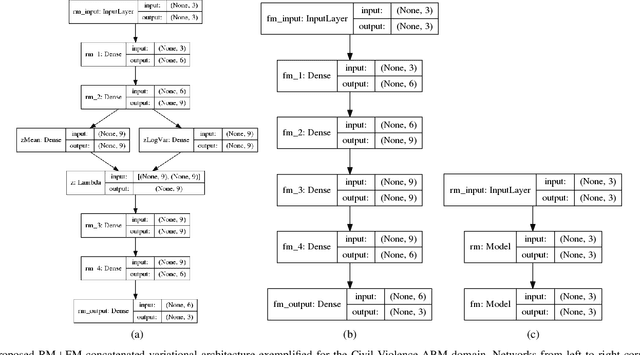
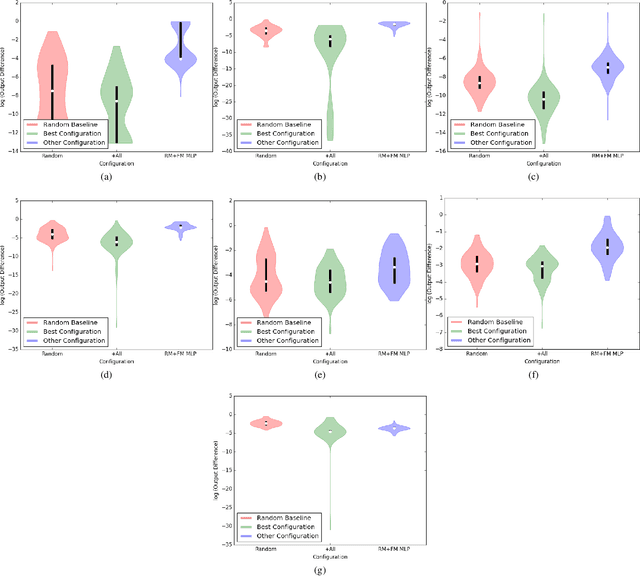
Agent-based modeling is a paradigm of modeling dynamic systems of interacting agents that are individually governed by specified behavioral rules. Training a model of such agents to produce an emergent behavior by specification of the emergent (as opposed to agent) behavior is easier from a demonstration perspective. Without the involvement of manual behavior specification via code or reliance on a defined taxonomy of possible behaviors, the demonstrator specifies the desired emergent behavior of the system over time, and retrieves agent-level parameters required to execute that motion. A low time-complexity and data requirement favoring framework for reproducing emergent behavior, given an abstract demonstration, is discussed in [1], [2]. The existing framework does, however, observe an inherent limitation in scalability because of an exponentially growing search space (with the number of agent-level parameters). Our work addresses this limitation by pursuing a more scalable architecture with the use of neural networks. While the (proof-of-concept) architecture is not suitable for many evaluated domains because of its lack of representational capacity for that domain, it is more suitable than existing work for larger datasets for the Civil Violence agent-based model.