 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhat Are You Looking at? Detecting Human Intention in Gaze based Human-Robot Interaction
Paper and Code
Sep 17, 2019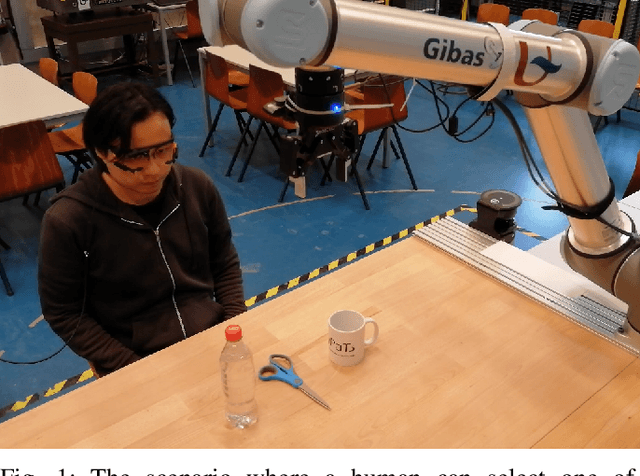
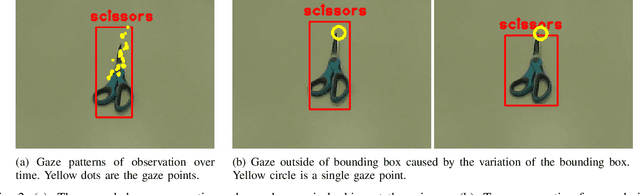
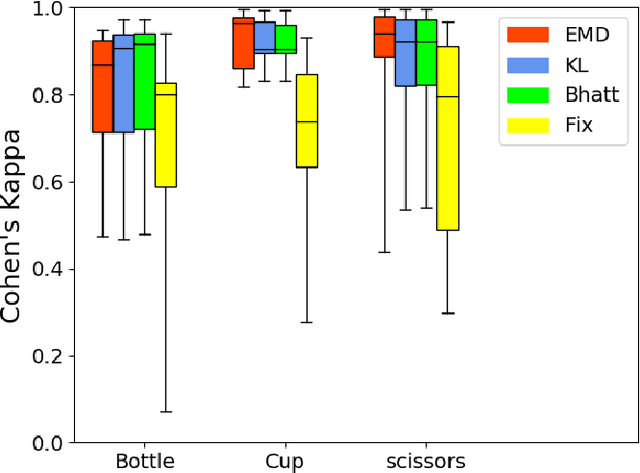
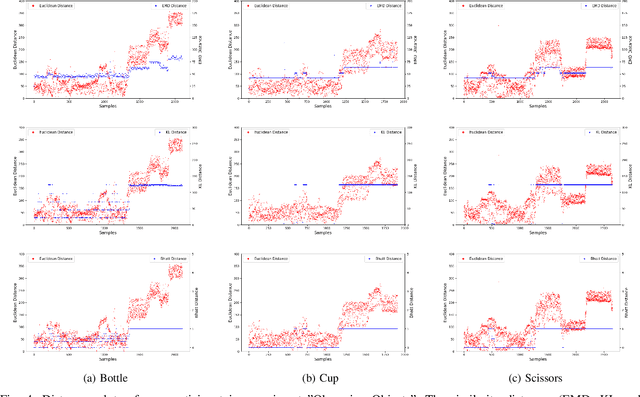
In gaze based Human-Robot Interaction (HRI), it is important to determine the human intention for further interaction. The gaze intention is often modelled as fixation. However, when looking at an object, it is not natural and it is difficult to maintain the gaze fixating on one point for a long time. Saccades may happen while a human is still focusing on the object. The prediction of human intention will be lost during saccades. In addition, while the human intention is on object, the gazes may be located outside of the object bounding box due to different noise sources, which would cause false negative predictions. In this work, we propose a novel approach to detect whether a human is focusing on an object in HRI application. We determine the gaze intention by comparing the similarity between the hypothetic gazes on objects and the actual gazes. We use Earth Mover's Distance (EMD) to measure the similarity and 1 Nearest Neighbour to classify which object a human is looking at. Our experimental results indicate that, compare to fixation, our method can successfully determine the human intention even during saccadic eye movements and increase the classification accuracy with noisy gaze data. We also demonstrate that, in the interaction with a robot, the proposed approach can obtain a high accuracy of object selection within successful predictions.