 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Hybrid Method for Online Trajectory Planning of Mobile Robots in Cluttered Environments
Paper and Code
Aug 22, 2019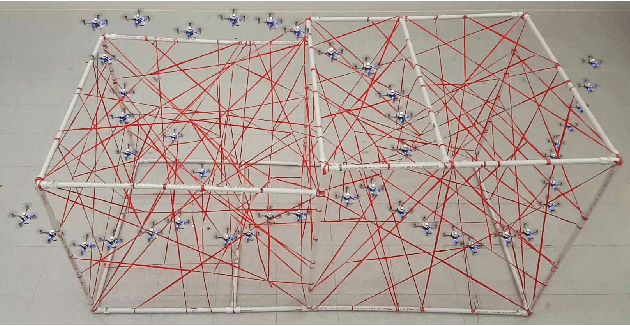
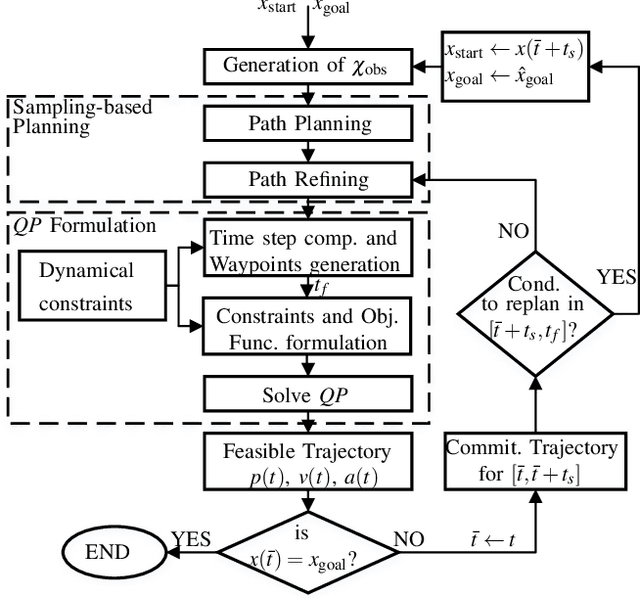
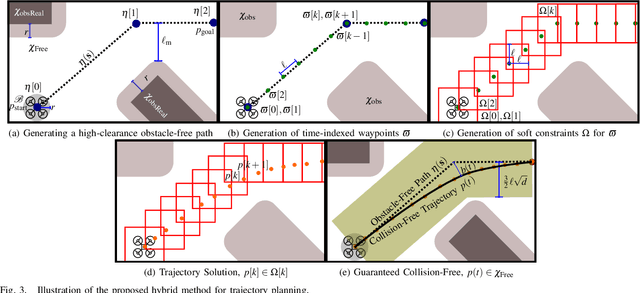
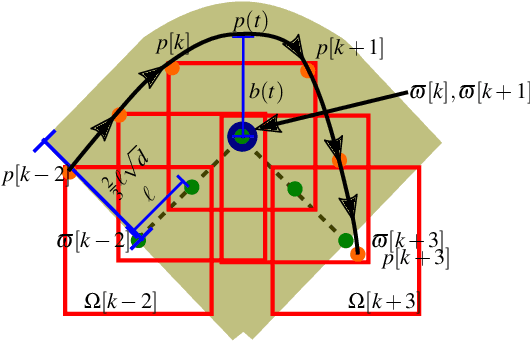
This paper presents a method for online trajectory planning in known environments. The proposed algorithm is a fusion of sampling-based techniques and model-based optimization via quadratic programming. The former is used to efficiently generate an obstacle-free path while the latter takes into account the robot dynamical constraints to generate a time-dependent trajectory. The main contribution of this work lies on the formulation of a convex optimization problem over the generated obstacle-free path that is guaranteed to be feasible. Thus, in contrast with previously proposed methods, iterative formulations are not required. The proposed method has been compared with state-of-the-art approaches showing a significant improvement in success rate and computation time. To illustrate the effectiveness of this approach for online planning, the proposed method was applied to the fluid autonomous navigation of a quadcopter in multiple environments consisting of up to two hundred obstacles. The scenarios hereinafter presented are some of the most densely cluttered experiments for online planning and navigation reported to date. See video at https://youtu.be/DJ1IZRL5t1Q