 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInteractive Learning of Environment Dynamics for Sequential Tasks
Paper and Code
Jul 19, 2019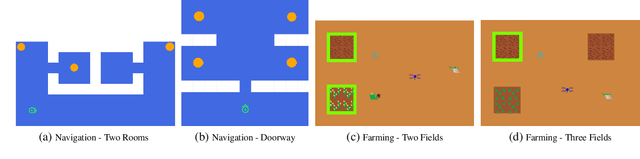
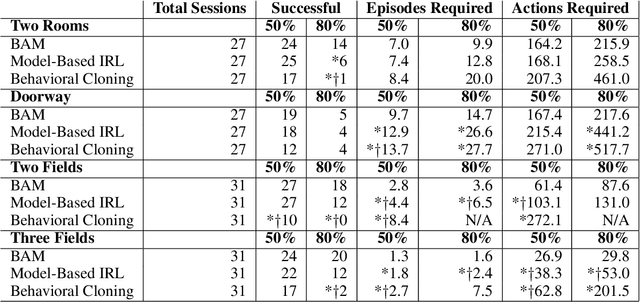
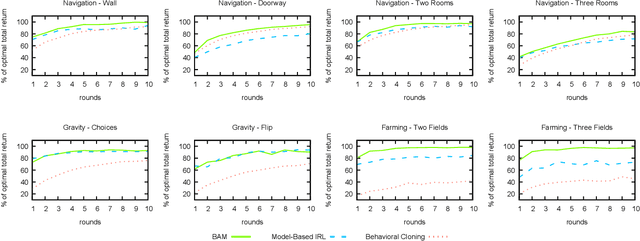
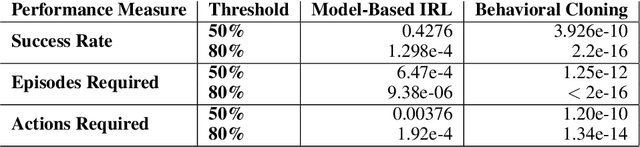
In order for robots and other artificial agents to efficiently learn to perform useful tasks defined by an end user, they must understand not only the goals of those tasks, but also the structure and dynamics of that user's environment. While existing work has looked at how the goals of a task can be inferred from a human teacher, the agent is often left to learn about the environment on its own. To address this limitation, we develop an algorithm, Behavior Aware Modeling (BAM), which incorporates a teacher's knowledge into a model of the transition dynamics of an agent's environment. We evaluate BAM both in simulation and with real human teachers, learning from a combination of task demonstrations and evaluative feedback, and show that it can outperform approaches which do not explicitly consider this source of dynamics knowledge.