 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Real-time RGB-D Visual Odometry in Dynamic Environments via Rigid Motion Model
Paper and Code
Jul 19, 2019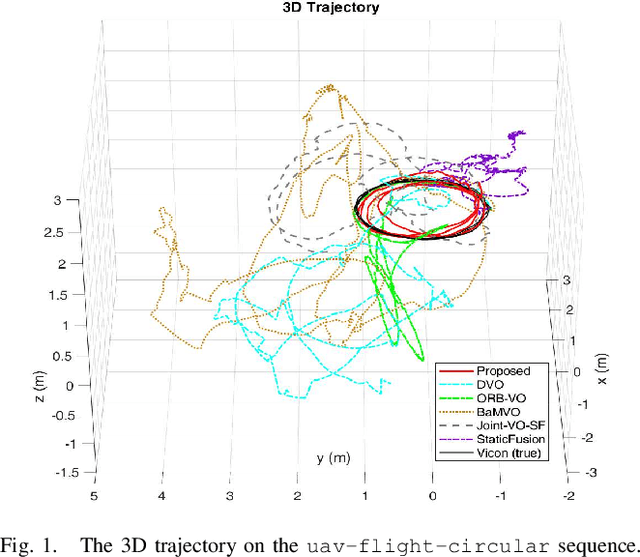

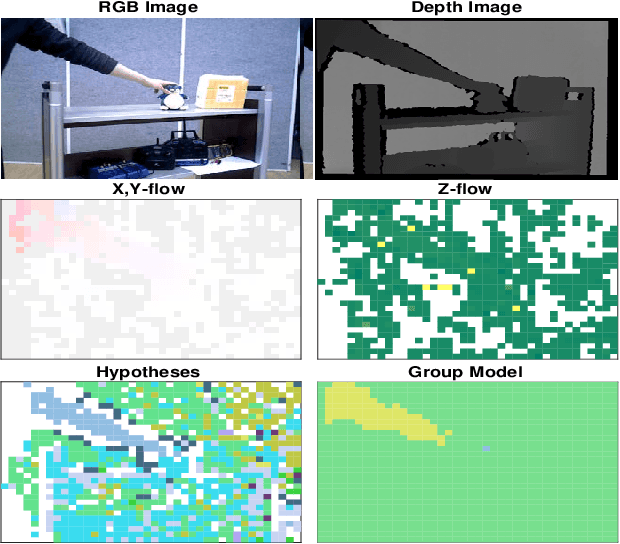

In the paper, we propose a robust real-time visual odometry in dynamic environments via rigid-motion model updated by scene flow. The proposed algorithm consists of spatial motion segmentation and temporal motion tracking. The spatial segmentation first generates several motion hypotheses by using a grid-based scene flow and clusters the extracted motion hypotheses, separating objects that move independently of one another. Further, we use a dual-mode motion model to consistently distinguish between the static and dynamic parts in the temporal motion tracking stage. Finally, the proposed algorithm estimates the pose of a camera by taking advantage of the region classified as static parts. In order to evaluate the performance of visual odometry under the existence of dynamic rigid objects, we use self-collected dataset containing RGB-D images and motion capture data for ground-truth. We compare our algorithm with state-of-the-art visual odometry algorithms. The validation results suggest that the proposed algorithm can estimate the pose of a camera robustly and accurately in dynamic environments.