 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Constrained $L_p$-$L_q$ Basis Pursuit Denoising Problem
Jul 01, 2019
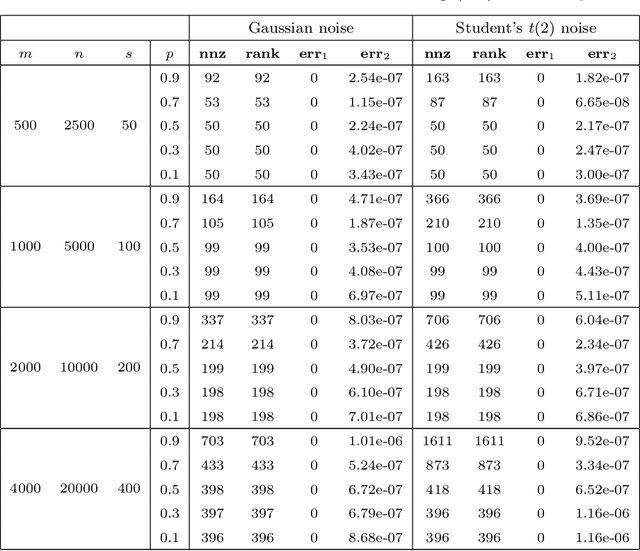
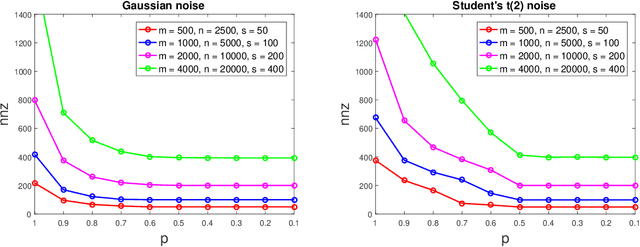
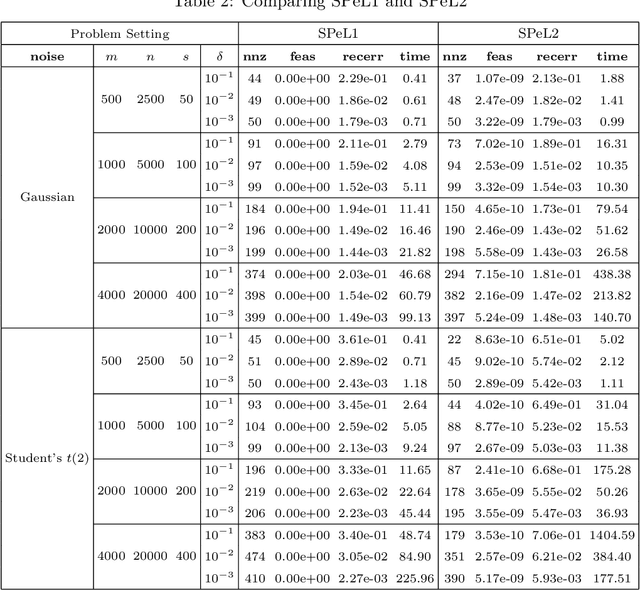
In this paper, we consider the constrained $L_p$-$L_q$ basis pursuit denoising problem, which aims to find a minimizer of $\|\bf{x}\|_p^p$ subject to $\|A\bf{x}-\bf{b}\|_q\leq\sigma$ for given $A \in \mathbb{R}^{m \times n}$, $\bf{b}\in\mathbb{R}^m$, $\sigma \geq0$, $0\leq p\leq1$ and $q \geq 1$. We first study the properties of the optimal solutions of this problem. Specifically, without any condition on the matrix $A$, we provide upper bounds in cardinality and infinity norm for the optimal solutions, and show that all optimal solutions must be on the boundary of the feasible set when $0<p<1$. Moreover, for $q \in \{1,\infty\}$, we show that the problem with $0<p<1$ has a finite number of optimal solutions and prove that there exists $0<p^*<1$ such that the solution set of the problem with any $0<p<p^*$ is contained in the solution set of the problem with $p=0$ and there further exists $0<\overline{p}<p^*$ such that the solution set of the problem with any $0<p\leq\overline{p}$ remains unchanged. An estimation of such $p^*$ is also provided. We then propose a smoothing penalty method to solve the problem with $0<p<1$ and $q=1$, and show that, under some mild conditions, any cluster point of the sequence generated is a KKT point of our problem. Some numerical examples are given to implicitly illustrate the theoretical results and show the efficiency of the proposed algorithm for the $L_p$-$L_1$ basis pursuit denoising problem under different noises.