 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn Training Flexible Robots using Deep Reinforcement Learning
Paper and Code
Jul 13, 2019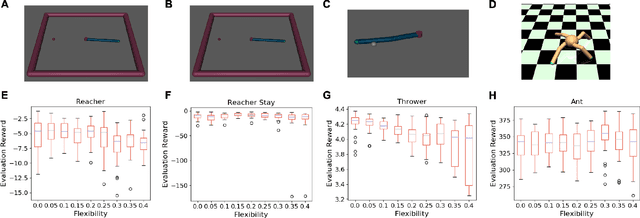


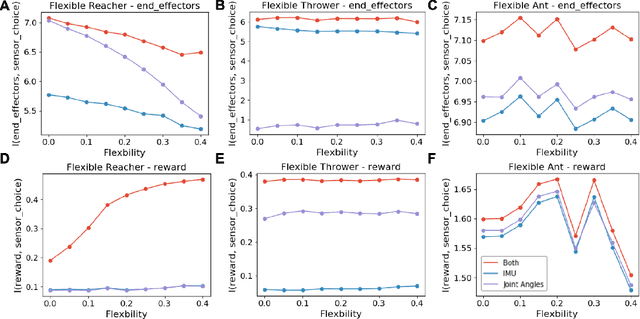
The use of robotics in controlled environments has flourished over the last several decades and training robots to perform tasks using control strategies developed from dynamical models of their hardware have proven very effective. However, in many real-world settings, the uncertainties of the environment, the safety requirements and generalized capabilities that are expected of robots make rigid industrial robots unsuitable. This created great research interest into developing control strategies for flexible robot hardware for which building dynamical models are challenging. In this paper, inspired by the success of deep reinforcement learning (DRL) in other areas, we systematically study the efficacy of policy search methods using DRL in training flexible robots. Our results indicate that DRL is successfully able to learn efficient and robust policies for complex tasks at various degrees of flexibility. We also note that DRL using Deep Deterministic Policy Gradients can be sensitive to the choice of sensors and adding more informative sensors does not necessarily make the task easier to learn.