 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLarge-scale 3D point cloud representations via graph inception networks with applications to autonomous driving
Paper and Code
Jun 26, 2019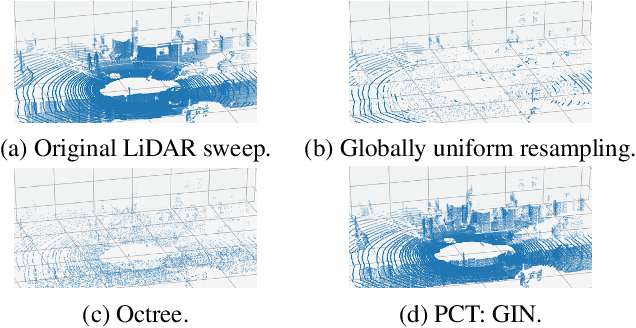
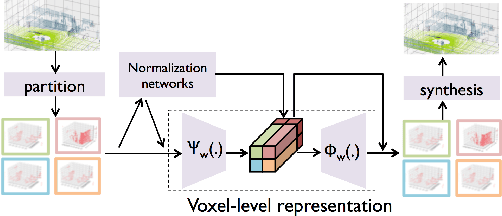
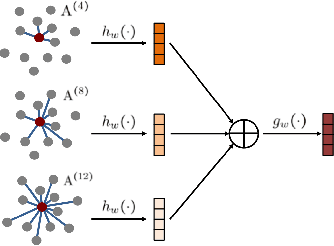
We present a novel graph-neural-network-based system to effectively represent large-scale 3D point clouds with the applications to autonomous driving. Many previous works studied the representations of 3D point clouds based on two approaches, voxelization, which causes discretization errors and learning, which is hard to capture huge variations in large-scale scenarios. In this work, we combine voxelization and learning: we discretize the 3D space into voxels and propose novel graph inception networks to represent 3D points in each voxel. This combination makes the system avoid discretization errors and work for large-scale scenarios. The entire system for large-scale 3D point clouds acts like the blocked discrete cosine transform for 2D images; we thus call it the point cloud neural transform (PCT). We further apply the proposed PCT to represent real-time LiDAR sweeps produced by self-driving cars and the PCT with graph inception networks significantly outperforms its competitors.