 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeneral Dynamic Neural Networks for explainable PID parameter tuning in control engineering: An extensive comparison
Paper and Code
May 30, 2019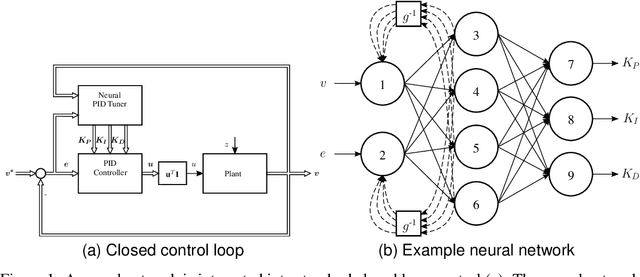
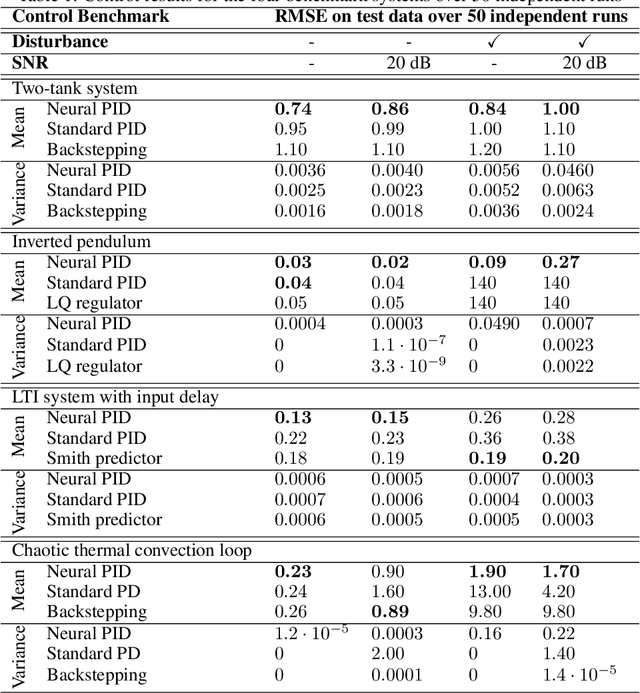
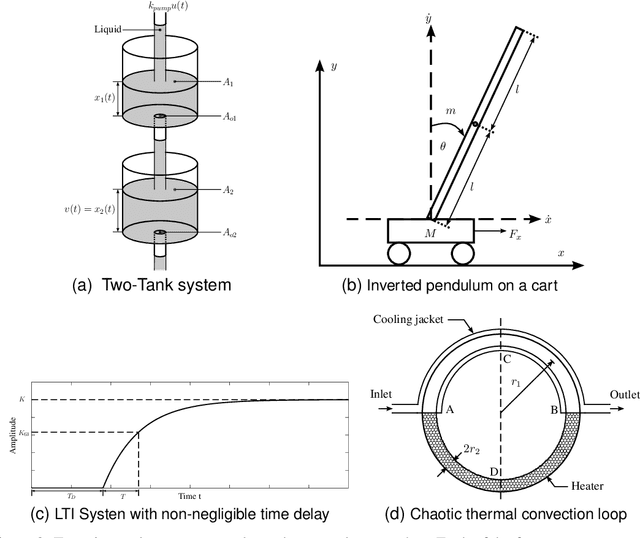
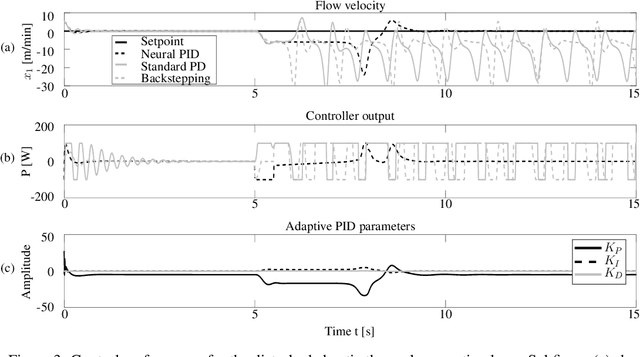
Automation, the ability to run processes without human supervision, is one of the most important drivers of increased scalability and productivity. Modern automation largely relies on forms of closed loop control, wherein a controller interacts with a controlled process via actions, based on observations. Despite an increase in the use of machine learning for process control, most deployed controllers still are linear Proportional-Integral-Derivative (PID) controllers. PID controllers perform well on linear and near-linear systems but are not robust enough for more complex processes. As a main contribution of this paper, we examine the utility of extending standard PID controllers with General Dynamic Neural Networks (GDNN); we show that GDNN (neural) PID controllers perform well on a range of control systems and highlight what is needed to make them a stable, scalable, and interpretable option for control. To do so, we provide a comprehensive study using four different benchmark processes. All control environments are evaluated with and without noise as well as with and without disturbances. The neural PID controller performs better than standard PID control in 15 of 16 tasks and better than model-based control in 13 of 16 tasks. As a second contribution of this work, we address the Achilles heel that prevents neural networks from being used in real-world control processes so far: lack of interpretability. We use bounded-input bounded-output stability analysis to evaluate the parameters suggested by the neural network, thus making them understandable for human engineers. This combination of rigorous evaluation paired with better explainability is an important step towards the acceptance of neural-network-based control approaches for real-world systems. It is furthermore an important step towards explainable and safe applied artificial intelligence.