Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTalk Proposal: Towards the Realistic Evaluation of Evasion Attacks using CARLA
Paper and Code

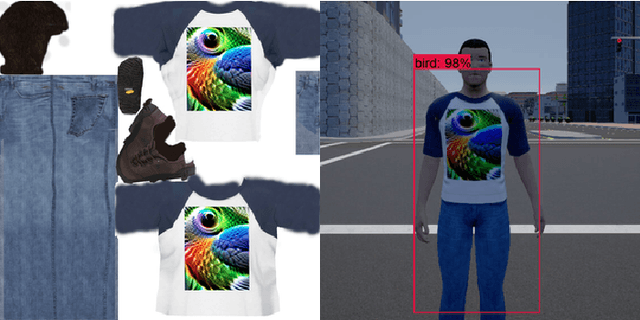
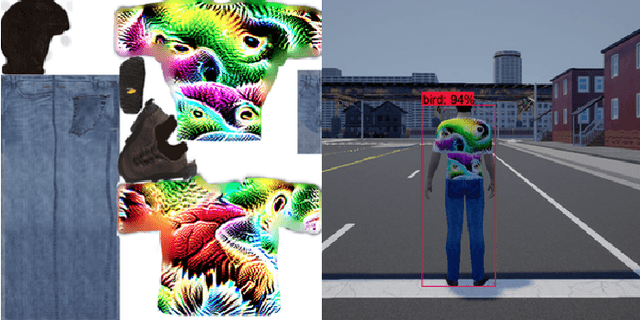

In this talk we describe our content-preserving attack on object detectors, ShapeShifter, and demonstrate how to evaluate this threat in realistic scenarios. We describe how we use CARLA, a realistic urban driving simulator, to create these scenarios, and how we use ShapeShifter to generate content-preserving attacks against those scenarios.
* Submitted as talk proposal to Dependable and Secure Machine Learning
(DSML '19)
View paper on