 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSetup of a Recurrent Neural Network as a Body Model for Solving Inverse and Forward Kinematics as well as Dynamics for a Redundant Manipulator
Paper and Code
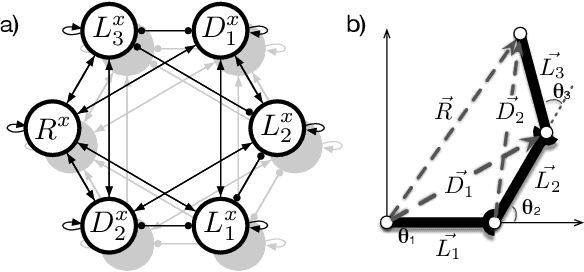
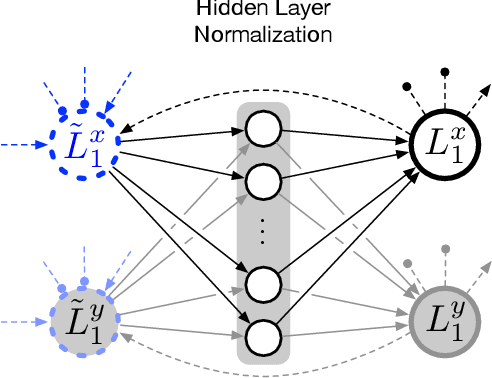
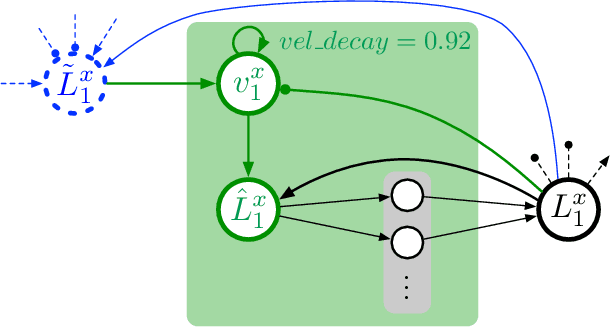
An internal model of the own body can be assumed a fundamental and evolutionary-early representation as it is present throughout the animal kingdom. Such functional models are, on the one hand, required in motor control, for example solving the inverse kinematic or dynamic task in goal-directed movements or a forward task in ballistic movements. On the other hand, such models are recruited in cognitive tasks as are planning ahead or observation of actions of a conspecific. Here, we present a functional internal body model that is based on the Mean of Multiple Computations principle. For the first time such a model is completely realized in a recurrent neural network as necessary normalization steps are integrated into the neural model itself. Secondly, a dynamic extension is applied to the model. It is shown how the neural network solves a series of inverse tasks. Furthermore, emerging representation in transformational layers are analyzed that show a form of prototypical population-coding as found in place or direction cells.