 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRecurrent Control Nets for Deep Reinforcement Learning
Paper and Code
Jan 18, 2019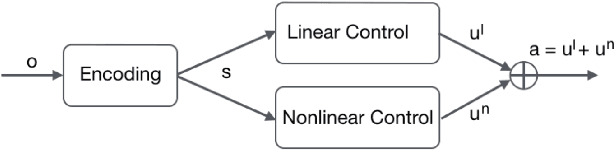
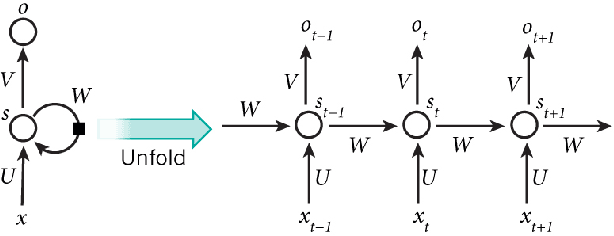
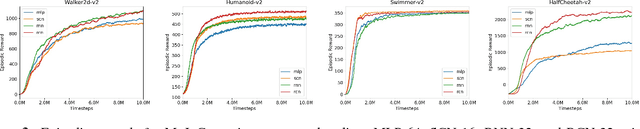
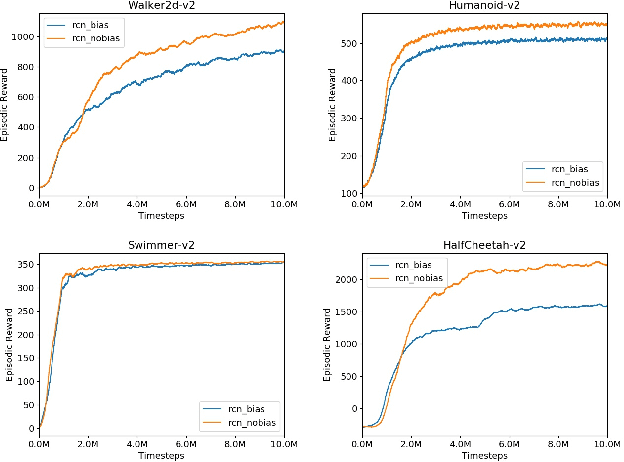
Central Pattern Generators (CPGs) are biological neural circuits capable of producing coordinated rhythmic outputs in the absence of rhythmic input. As a result, they are responsible for most rhythmic motion in living organisms. This rhythmic control is broadly applicable to fields such as locomotive robotics and medical devices. In this paper, we explore the possibility of creating a self-sustaining CPG network for reinforcement learning that learns rhythmic motion more efficiently and across more general environments than the current multilayer perceptron (MLP) baseline models. Recent work introduces the Structured Control Net (SCN), which maintains linear and nonlinear modules for local and global control, respectively. Here, we show that time-sequence architectures such as Recurrent Neural Networks (RNNs) model CPGs effectively. Combining previous work with RNNs and SCNs, we introduce the Recurrent Control Net (RCN), which adds a linear component to the, RCNs match and exceed the performance of baseline MLPs and SCNs across all environment tasks. Our findings confirm existing intuitions for RNNs on reinforcement learning tasks, and demonstrate promise of SCN-like structures in reinforcement learning.