 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSingle-Agent Policy Tree Search With Guarantees
Paper and Code
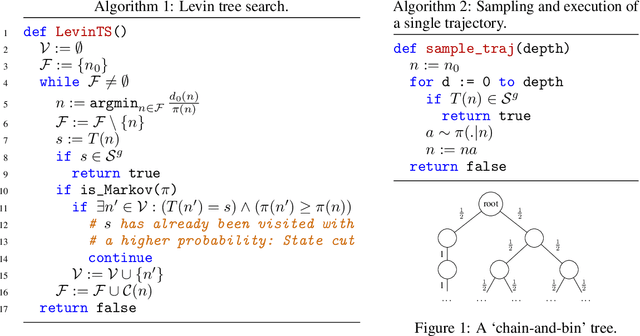
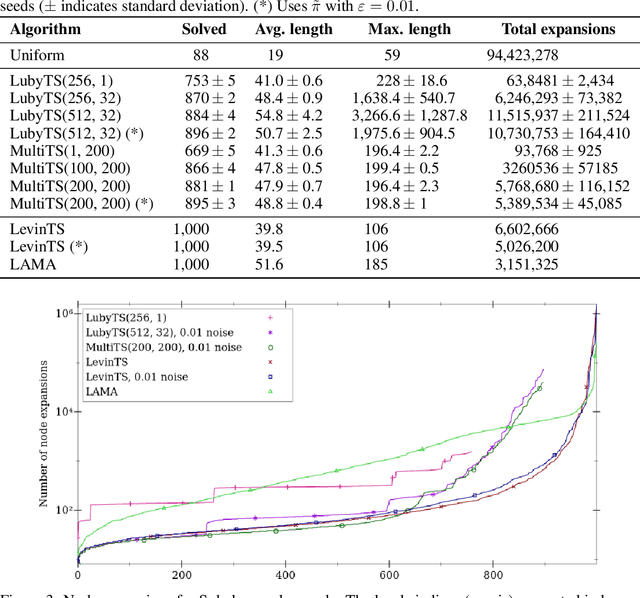
We introduce two novel tree search algorithms that use a policy to guide search. The first algorithm is a best-first enumeration that uses a cost function that allows us to prove an upper bound on the number of nodes to be expanded before reaching a goal state. We show that this best-first algorithm is particularly well suited for `needle-in-a-haystack' problems. The second algorithm is based on sampling and we prove an upper bound on the expected number of nodes it expands before reaching a set of goal states. We show that this algorithm is better suited for problems where many paths lead to a goal. We validate these tree search algorithms on 1,000 computer-generated levels of Sokoban, where the policy used to guide the search comes from a neural network trained using A3C. Our results show that the policy tree search algorithms we introduce are competitive with a state-of-the-art domain-independent planner that uses heuristic search.