 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Novel Variational Family for Hidden Nonlinear Markov Models
Paper and Code
Nov 06, 2018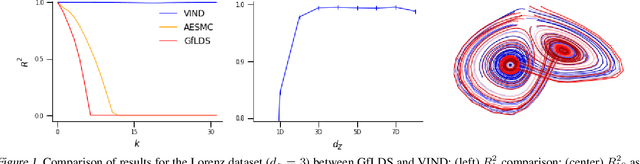
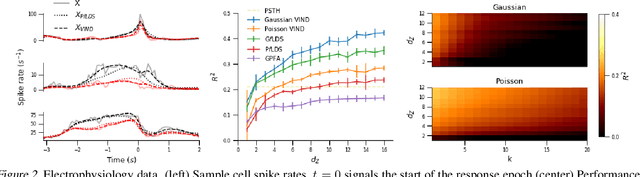
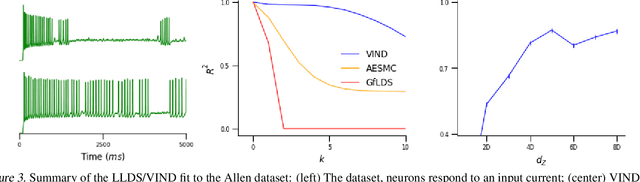
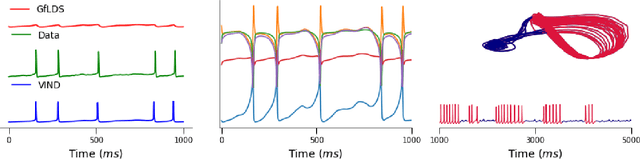
Latent variable models have been widely applied for the analysis and visualization of large datasets. In the case of sequential data, closed-form inference is possible when the transition and observation functions are linear. However, approximate inference techniques are usually necessary when dealing with nonlinear dynamics and observation functions. Here, we propose a novel variational inference framework for the explicit modeling of time series, Variational Inference for Nonlinear Dynamics (VIND), that is able to uncover nonlinear observation and transition functions from sequential data. The framework includes a structured approximate posterior, and an algorithm that relies on the fixed-point iteration method to find the best estimate for latent trajectories. We apply the method to several datasets and show that it is able to accurately infer the underlying dynamics of these systems, in some cases substantially outperforming state-of-the-art methods.