 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEstimation for Quadrotors
Paper and Code
Aug 31, 2018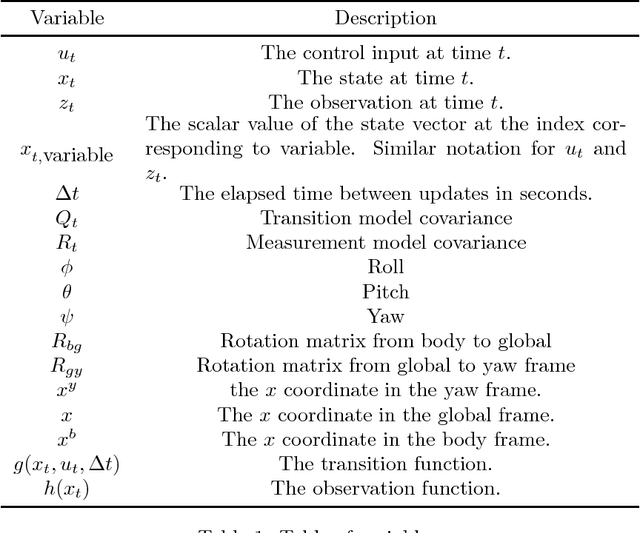
This document describes standard approaches for filtering and estimation for quadrotors, created for the Udacity Flying Cars course. We assume previous knowledge of probability and some knowledge of linear algebra. We do not assume previous knowledge of Kalman filters or Bayes filters. This document derives an EKF for various models of drones in 1D, 2D, and 3D. We use the EKF and notation as defined in Thrun et al. [13]. We also give pseudocode for the Bayes filter, the EKF, and the Unscented Kalman filter [14]. The motivation behind this document is the lack of a step-by-step EKF tutorial that provides the derivations for a quadrotor helicopter. The goal of estimation is to infer the drone's state (pose, velocity, acceleration, and biases) from its sensor values and control inputs. This problem is challenging because sensors are noisy. Additionally, because of weight and cost issues, many drones have limited on-board computation so we want to estimate these values as quickly as possible. The standard method for performing this method is the Extended Kalman filter, a nonlinear extension of the Kalman filter which linearizes a nonlinear transition and measurement model around the current state. However the Unscented Kalman filter is better in almost every respect: simpler to implement, more accurate to estimate, and comparable runtimes.