 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHow to Blend a Robot within a Group of Zebrafish: Achieving Social Acceptance through Real-time Calibration of a Multi-level Behavioural Model
Paper and Code
May 29, 2018
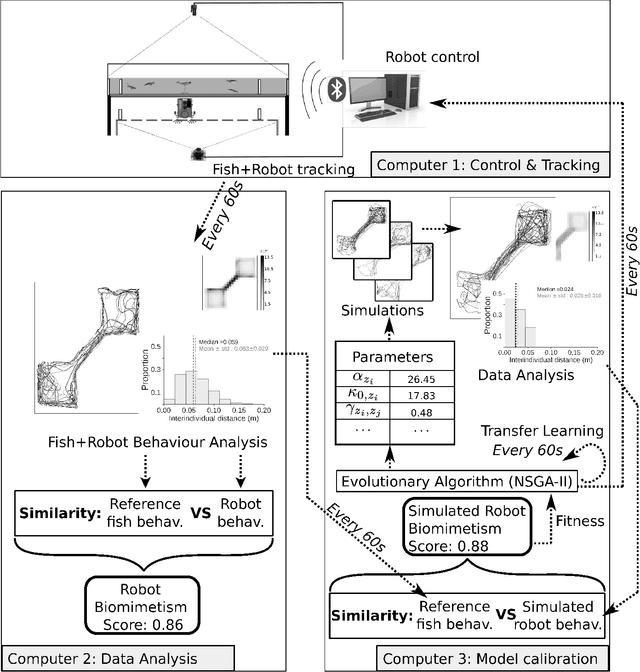
We have previously shown how to socially integrate a fish robot into a group of zebrafish thanks to biomimetic behavioural models. The models have to be calibrated on experimental data to present correct behavioural features. This calibration is essential to enhance the social integration of the robot into the group. When calibrated, the behavioural model of fish behaviour is implemented to drive a robot with closed-loop control of social interactions into a group of zebrafish. This approach can be useful to form mixed-groups, and study animal individual and collective behaviour by using biomimetic autonomous robots capable of responding to the animals in long-standing experiments. Here, we show a methodology for continuous real-time calibration and refinement of multi-level behavioural model. The real-time calibration, by an evolutionary algorithm, is based on simulation of the model to correspond to the observed fish behaviour in real-time. The calibrated model is updated on the robot and tested during the experiments. This method allows to cope with changes of dynamics in fish behaviour. Moreover, each fish presents individual behavioural differences. Thus, each trial is done with naive fish groups that display behavioural variability. This real-time calibration methodology can optimise the robot behaviours during the experiments. Our implementation of this methodology runs on three different computers that perform individual tracking, data-analysis, multi-objective evolutionary algorithms, simulation of the fish robot and adaptation of the robot behavioural models, all in real-time.