 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Neural Network Based Subspace Learning of Robotic Manipulator Workspace Mapping
Paper and Code
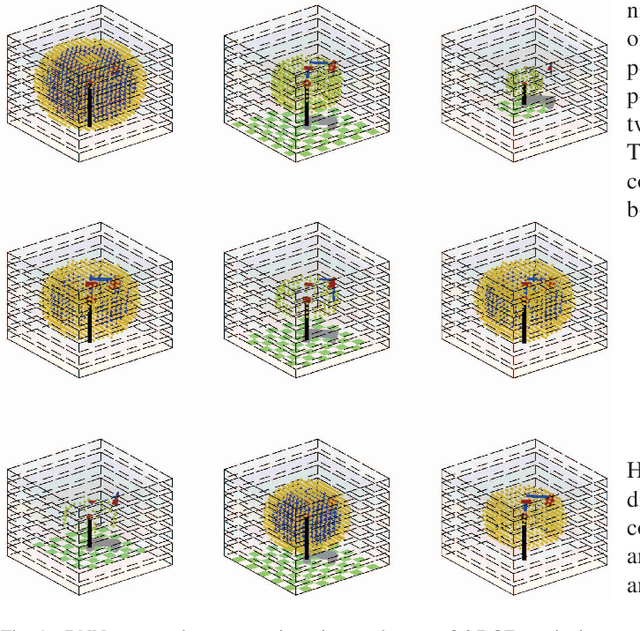
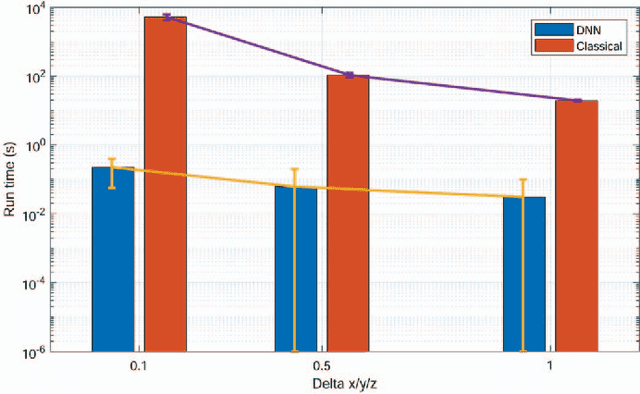
The manipulator workspace mapping is an important problem in robotics and has attracted significant attention in the community. However, most of the pre-existing algorithms have expensive time complexity due to the reliance on sophisticated kinematic equations. To solve this problem, this paper introduces subspace learning (SL), a variant of subspace embedding, where a set of robot and scope parameters is mapped to the corresponding workspace by a deep neural network (DNN). Trained on a large dataset of around $\mathbf{6\times 10^4}$ samples obtained from a MATLAB$^\circledR$ implementation of a classical method and sampling of designed uniform distributions, the experiments demonstrate that the embedding significantly reduces run-time from $\mathbf{5.23 \times 10^3}$ s of traditional discretization method to $\mathbf{0.224}$ s, with high accuracies (average F-measure is $\mathbf{0.9665}$ with batch gradient descent and resilient backpropagation).