 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Structural Correlation Filter Combined with A Multi-task Gaussian Particle Filter for Visual Tracking
Paper and Code
Mar 03, 2018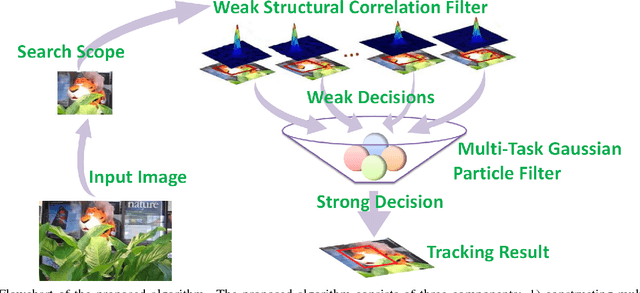


In this paper, we propose a novel structural correlation filter combined with a multi-task Gaussian particle filter (KCF-GPF) model for robust visual tracking. We first present an assemble structure where several KCF trackers as weak experts provide a preliminary decision for a Gaussian particle filter to make a final decision. The proposed method is designed to exploit and complement the strength of a KCF and a Gaussian particle filter. Compared with the existing tracking methods based on correlation filters or particle filters, the proposed tracker has several advantages. First, it can detect the tracked target in a large-scale search scope via weak KCF trackers and evaluate the reliability of weak trackers\rq decisions for a Gaussian particle filter to make a strong decision, and hence it can tackle fast motions, appearance variations, occlusions and re-detections. Second, it can effectively handle large-scale variations via a Gaussian particle filter. Third, it can be amenable to fully parallel implementation using importance sampling without resampling, thereby it is convenient for VLSI implementation and can lower the computational costs. Extensive experiments on the OTB-2013 dataset containing 50 challenging sequences demonstrate that the proposed algorithm performs favourably against 16 state-of-the-art trackers.