Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Driving in Reality with Reinforcement Learning and Image Translation
Paper and Code
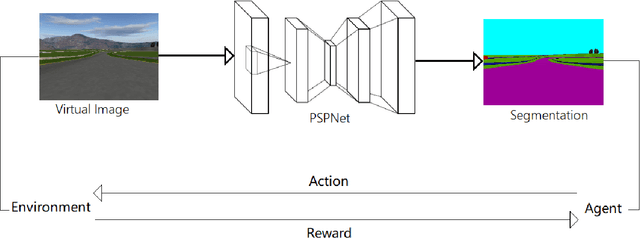

Supervised learning is widely used in training autonomous driving vehicle. However, it is trained with large amount of supervised labeled data. Reinforcement learning can be trained without abundant labeled data, but we cannot train it in reality because it would involve many unpredictable accidents. Nevertheless, training an agent with good performance in virtual environment is relatively much easier. Because of the huge difference between virtual and real, how to fill the gap between virtual and real is challenging. In this paper, we proposed a novel framework of reinforcement learning with image semantic segmentation network to make the whole model adaptable to reality. The agent is trained in TORCS, a car racing simulator.
* arXiv admin note: text overlap with arXiv:1704.03952 by other authors
View paper on